

You probably reached this "Blog6" page from that called
Snoopy's October 2016 Atlantic Attempt,
Snoopy,
or the
Design of Snoopy Sloop page
.
If not, click on a link to know more.
Each "blog" page describes detailed work preparing for the next Atlantic Attempt.
i.e. covering a period in the region of a year: less if more than one attempt is made.
The Blog pages were started after the first 2012 Attempt, where Snoopy's boat was lost. All later attempts were
with the same boat, sometimes after major repairs. The blogs provide online "Engineering Notebooks",
providing a day-by-day account of repairs, changes, and testing: mostly testing.

 These blog pages are mostly about numerous repairs to the boat, results from "BRAY LAKE TEsts", or 24/7 reliability testing on Bray Lake.
i.s. Snoopy sailing back and forth over a 24/7 waypoint in "Snoopy Corner". This is typically for several weeks,
in all weather, including gale force winds.
Sometimes, a few things happened which resulted in amusing pictures or stories,
such as countering human-intervention, or testing the wheels for Snoopy's trolly.
Click on the pictures either side for larger versions, or visit earlier blogs above.
BlogX, the "blog of experiments", shows ideas and products, some of which may appear
in future boats.
These blog pages are mostly about numerous repairs to the boat, results from "BRAY LAKE TEsts", or 24/7 reliability testing on Bray Lake.
i.s. Snoopy sailing back and forth over a 24/7 waypoint in "Snoopy Corner". This is typically for several weeks,
in all weather, including gale force winds.
Sometimes, a few things happened which resulted in amusing pictures or stories,
such as countering human-intervention, or testing the wheels for Snoopy's trolly.
Click on the pictures either side for larger versions, or visit earlier blogs above.
BlogX, the "blog of experiments", shows ideas and products, some of which may appear
in future boats.
This material has been moved to the new Blog6a page, since this Blog6 is getting big :-)
We started with analysis of what we think went wrong with the boat on the October 2016 Attempt. It makes sense to get as much information as possible from each attempt, before making the next boat. As it happens, Boat 11 has been "waiting in the wings" for years. We did not expect to keep getting Boat 10 back ! :-)
This "Blog6" is a record of repairs and changes made to the boat,
after the October 2016 Atlantic Attempt.
![]()
You can read the full story in pictures and video on Snoopy's October 2016 Atlantic Attempt.


![]()
The following is taken directly from the Design page, where it has been for some time. Perhaps I should add "5) do Bray Lake Tests to check the rudder is central" ! :-)
There is a lot I would not change in the 2017 Boat. e.g. 1.2 metre long Marblehead hull with IOM #3 Storm sails; GPS-Only Autopilot, based on Picaxe computer and Globalsat BR355 GPS. I may experiment with new ideas, such as power switching, compass steering, and wind direction sensors - but they are only adopted after many months, or even years, of prototyping then thorough testing. However, I've added this section, so you don't miss important future changes, mostly based on the discovery of better products. In short they are: 1) Use of SPOT Trace, instead of a modified SPOT Messenger; 2) Use of the Picaxe 28X2 Computer, instead of the Picaxe 08M2: more memory and comes assembled; 3) Use of the Globalsat BR355-S2 GPS, including applying a firmware patch, and configuring it with Static Navigation off, and only $GPRMC sentences; 4) Fewer but better solar panels. You will see these products discussed in more detail, later on this "Design" page and linked pages. The pictures should help you find the relevant sections.


Responding to a sighting of Snoopy will obviously take priority: we would re-run the DRIFT model to get a better guestimate of where he goes next. If, by good fortune, he is rescued, we can decide what museum to put him in. One thing is for sure, it's time for Snoopy's boat 10 to retire, and for Snoopy to sail Boat 11, that has been "waiting in the wings" for years :-)
Here is a list of things planned, and things we should not forget to do:
15th October 2016: Picaxe 28X2 Autopilot software version AP28X2F.BAS 15Oct16 created by copying version AP28X2E used in Eric's Boat 12, to sail around Goldsworth Park Lake. Comments were added to the front, but changes to the code not yet made. First changes are expected to be speaking the new version and date, removal of the Goldsworth Park waypoints, and putting back those used for "Tea-Tray Testing" in Armitage Court. Peter, Dick, Roy and Terry, were sent a copy for thir information and possible review.
The Boat 12 Autopilot was switched on, after being dormant for months. The Globalsat BR355-S2 seems to have retained it's settings, like Static Navigation being OFF, because it did what it should: random rudder movements, indicating the required movement sensitivity. Boat 11, in the garden, was weighed, and found to be 11.9 kg. This will increase, but hopefully not to Boat 10's 16 kg !
 16th October 2016: Robin & June visited Bray Lake and spoke to Andy (Simon's deputy). Email exchange later, with permision to do.
You will see problems in some of the recent videos of Bray Lake Tests. Boats 11 and 12 have deeper keels. Vegetation obstructs filming.
A "Tea Tray" Picaxe 28X2 Autopilot was plugged together, based on spares, including the 28X2, Globalsat GPS, Servo, and Text-To-Speech unit.
The software AP28X2F.BAS was updated to 16 October, including changing the startup speech to say "28X2 Autopilot 16 October 2016"
after the usual waggle of the servo. After a few seconds, it then went into the normal 7 second control cycle, steering
to the default Bray Lake waypoint A and saying things like, "Time is 2001, Speed is 0.3 knots, on course of 80, Target Alpha is 7 miles,
at 349,
turn left by 91". More spares have been ordered: three Globalsat BR355-S4 from Digigomart at 30.30 GBP each; One Parallax Emic 2 TTS for 90.90 GBP,
half of which is shipping from the USA. Depending on power, we might consider the cost of having a TTS on the boat that makes the attempt,
with a suitable GSM based "spy tracker" like the Pocket Pal on the
AVL page. e.g. to listen in to any conversations Snoopy might have to those nearby,
or the sound of him hitting rocks ! :-)
16th October 2016: Robin & June visited Bray Lake and spoke to Andy (Simon's deputy). Email exchange later, with permision to do.
You will see problems in some of the recent videos of Bray Lake Tests. Boats 11 and 12 have deeper keels. Vegetation obstructs filming.
A "Tea Tray" Picaxe 28X2 Autopilot was plugged together, based on spares, including the 28X2, Globalsat GPS, Servo, and Text-To-Speech unit.
The software AP28X2F.BAS was updated to 16 October, including changing the startup speech to say "28X2 Autopilot 16 October 2016"
after the usual waggle of the servo. After a few seconds, it then went into the normal 7 second control cycle, steering
to the default Bray Lake waypoint A and saying things like, "Time is 2001, Speed is 0.3 knots, on course of 80, Target Alpha is 7 miles,
at 349,
turn left by 91". More spares have been ordered: three Globalsat BR355-S4 from Digigomart at 30.30 GBP each; One Parallax Emic 2 TTS for 90.90 GBP,
half of which is shipping from the USA. Depending on power, we might consider the cost of having a TTS on the boat that makes the attempt,
with a suitable GSM based "spy tracker" like the Pocket Pal on the
AVL page. e.g. to listen in to any conversations Snoopy might have to those nearby,
or the sound of him hitting rocks ! :-)
Below are Snoopy's boats, all fitted with experimental Autopilots. From Left to right: Boat6, Boat11, Eric's IOM Boat12, and little "Affinity". We may begin by testing with Eric's Boat 12 which already has a Picaxe 28X2 based Autopilot. This could be a better boat for first investigations, with Bray Lake Tests, of things like analysing steering errors, and those "tweaks" mentioned above. See RB12Blog" How we built Boat 12 from Eric's IOM, including the Picaxe 28X2 Autopilot, and Eric's Page. Click on the pictures to enlarge.
 Monday 17th October 2016:
The latest 28X2 Autopilot software will be loaded into Boat 11, for 2017, but may also be tested in other boats, such as Boat 12. But before that,
we can do useful tests at home, including how the velocity accuracy of the new Globalsat BR355-S2 compares with that of the old BR355 used for years.
First step was to see what Autopilots we have in the boats, in addition to that now on a Tea Tray:
Monday 17th October 2016:
The latest 28X2 Autopilot software will be loaded into Boat 11, for 2017, but may also be tested in other boats, such as Boat 12. But before that,
we can do useful tests at home, including how the velocity accuracy of the new Globalsat BR355-S2 compares with that of the old BR355 used for years.
First step was to see what Autopilots we have in the boats, in addition to that now on a Tea Tray:
Boat6 ( yellow on left ): plugging in a TTS unit and switching on, made it speak "Autopilot for 28X2, 12th March 2016". Looking inside the Autopilot box we could see no compass and the old Globalsat BR355 GPS, used in all previous attempts. Looking at the "Change History" in the code, we can see that AP28X2D was after having two 24/7 waypoints on Bray Lake instead of one. AP28X2E removed Armitage Court waypoint, to make space for Goldsworth Park ones. i.e. our latest AP28X2F should be the same as that in Boat 6, other than the GPS. Boat6 then settled down into it's control cycle, steering to Bray Lake "A", saying speed was either 0.0 or 0.1 knots. This implies our old BR355 may have been accurate to 0.1 of a knot. i.e, direction errors no more than 45 degrees at 0.1 knots, decreasing to below 10 degrees above 0.5 knots real speed. Maybe the new BR355-S2 will be better: hence our wish for tests on this speed accuracy soon.
 Boat 11 (in middle): IMPORTANT NOTE: THE RUDDER LEVER GRUB SCREW WAS COMPLETELY LOSE, WITH RUDDER FLAPPING ABOUT !
Perhaps I did this sometime, without remembering to tighten it up with the required Allen Key ? Now fixed,
and all of this rudder linkage will be changed anyway. e.g. two clamped Z-links.
It was easier to see that Boat11 had a new BR355-S2 GPS because of the blue transparent Autopilot box.
When ordering they are referred to as "BR355-S2" but the plastic top is labelled "G-Star IV".
The Autopilot starts up with "... 3rd May", so that means... AP28X2d - when working on Goldsworth Park waypoints.
So Boat 11 can be loaded with the latest version AP28X2F.
Spoken speed, after the system had settled into it's control loop, was "0.0 knots", which is promising, reguarding improved
velocity ( and therefore direction ) accuracy of this later model of GPS.
Boat 11 (in middle): IMPORTANT NOTE: THE RUDDER LEVER GRUB SCREW WAS COMPLETELY LOSE, WITH RUDDER FLAPPING ABOUT !
Perhaps I did this sometime, without remembering to tighten it up with the required Allen Key ? Now fixed,
and all of this rudder linkage will be changed anyway. e.g. two clamped Z-links.
It was easier to see that Boat11 had a new BR355-S2 GPS because of the blue transparent Autopilot box.
When ordering they are referred to as "BR355-S2" but the plastic top is labelled "G-Star IV".
The Autopilot starts up with "... 3rd May", so that means... AP28X2d - when working on Goldsworth Park waypoints.
So Boat 11 can be loaded with the latest version AP28X2F.
Spoken speed, after the system had settled into it's control loop, was "0.0 knots", which is promising, reguarding improved
velocity ( and therefore direction ) accuracy of this later model of GPS.
 Eric's IOM Boat 12 ( with blue sails ): This also has a Picaxe 28X2 + BR355-S2 Autopilot. It starts up with "12th May 2016",
indication version AP28X2E, after correction of Goldsworth Park waypoints. This can also be replaced by latest version AP28X2F.BAS.
It also gives "... 0.0 knots ..." when running on our front drive.
Eric's IOM Boat 12 ( with blue sails ): This also has a Picaxe 28X2 + BR355-S2 Autopilot. It starts up with "12th May 2016",
indication version AP28X2E, after correction of Goldsworth Park waypoints. This can also be replaced by latest version AP28X2F.BAS.
It also gives "... 0.0 knots ..." when running on our front drive.
Last, but not least, little "Affinity", just 0.65 metres long, and Snoopy's most recent robot boat featured on Eric's Page including it doing the Bray Lake Test ! I could not resist copying the Youtube video to here: check it out on the right ! :-) Affinity has the same Picaxe 08M2 + old BR-355 GPS used in recent Atlantic Attempts, including that in October 2016. It settles down into it's control loop, speaking directions and steering to Bray Lake. It does not speak speed because memory was so tight - even the startup title was cut down to only "15 2" !
Boats 11 & 12 had the latest AP28X2F software loaded into their Picaxe 28X2 Atopilots. All four boats are ready for tests ! :-)
![]()
 Wednesday 19th October 2016:
Great progress today, and the most important work was done by other members of our Team.
Click on the pictures to enlarge, or play video.
We have a better Picaxe 08M2 based Autoplot for
the 2017 boat in Affinity, but we are working on a better one, based on the Picaxe 28X2. Peter's test rig showed a bug that would have
been fatal, and would have been difficult to find any other way. The picture on the left is from Peter's Software Test Rig,
and compares the direction to waypoint between the good 08M2 Software used so far, and our latest experimental 28X2 version.
In short: if the destination waypoint is in has different degrees of latitude/longitude as the Boat, the direction is wrong.
Examination of the code showed this was due to a block of code that is not needed anyway ! It simply speaks the distance to
the waypoint in this situation. Range is not used for navigation and steering - only information for us to monitor the progress.
Removing this code will also free up a lot of memory. Well Done Peter ! Others are also helping, but the other sign of some
visible progress was Robin's first "Tea Tray Test" near his home, with new test hardware like a wide angle Mobius camera.
Check out the youtube video. Other such tests will follow, as we make software changes and test them.
Wednesday 19th October 2016:
Great progress today, and the most important work was done by other members of our Team.
Click on the pictures to enlarge, or play video.
We have a better Picaxe 08M2 based Autoplot for
the 2017 boat in Affinity, but we are working on a better one, based on the Picaxe 28X2. Peter's test rig showed a bug that would have
been fatal, and would have been difficult to find any other way. The picture on the left is from Peter's Software Test Rig,
and compares the direction to waypoint between the good 08M2 Software used so far, and our latest experimental 28X2 version.
In short: if the destination waypoint is in has different degrees of latitude/longitude as the Boat, the direction is wrong.
Examination of the code showed this was due to a block of code that is not needed anyway ! It simply speaks the distance to
the waypoint in this situation. Range is not used for navigation and steering - only information for us to monitor the progress.
Removing this code will also free up a lot of memory. Well Done Peter ! Others are also helping, but the other sign of some
visible progress was Robin's first "Tea Tray Test" near his home, with new test hardware like a wide angle Mobius camera.
Check out the youtube video. Other such tests will follow, as we make software changes and test them.
Here is a plot of tt191016.nme from the GPS Logger on the Tea Tray, using GPSS on a Windows & PC. We can make the picture smaller later.
The latest 19Oct16 version of the experimental AP28X2F.BAS was given to those helping test it. It's now in the Tea Tray system. Changes include removing that unwanted block of code and using a software switch based on startup to always apply rudder trim: not just when the target heading error is greater than 30 degrees. Bray Lake Tests will see if it shows an improvement.
Friday 11th November 2016:

 Three weeks without time spent on robot boat 11, other than the valuable chats with our extended Team-Joker.
Click on the animated picture on the left for my
Bigger Picture
page.
I guess the time I have available for Snoopy's robot boat averages less than a day per week, over the year,
including discussion, building, and testing - mostly testing. I need to spend my time where it matters.
Although priority is given to discussion over a coffee or beer ;-)
Chats with Eric, John and Terry prompted me to change that rudder servo linkage on Boat 11
- while I remembered ! The rudder shaft has not (yet) been changed, for a bigger diameter one, but it DOES
now have a flat filed on the shaft, to receive the grub screw. It has also been changed to the double Z-bend,
clamped by terminal block parts. Camcorder problem fixed - found a hidden switch.
I have updated the firmware in four new Globalsat BR-355 S4, including applying the patch (www.gpss.co.uk/rbpatch.zip), setting Static Navigation OFF, and setting
to NMEA at 4800 with only $GPRMC sentences. See documentation near end of
BlogX. I did find that cable, but only after returning from Maplins (and Bray Lake)
with parts to make up the cable ! I've ordered another SPOT Trace, at 84 GBP delivered from Globaltelesatcoms.
I put together a Picaxe 08M2 / BR-355 S4 based Autopilot, and this is now in Boat 11, loaded with AUTOP10.BAS.
Three weeks without time spent on robot boat 11, other than the valuable chats with our extended Team-Joker.
Click on the animated picture on the left for my
Bigger Picture
page.
I guess the time I have available for Snoopy's robot boat averages less than a day per week, over the year,
including discussion, building, and testing - mostly testing. I need to spend my time where it matters.
Although priority is given to discussion over a coffee or beer ;-)
Chats with Eric, John and Terry prompted me to change that rudder servo linkage on Boat 11
- while I remembered ! The rudder shaft has not (yet) been changed, for a bigger diameter one, but it DOES
now have a flat filed on the shaft, to receive the grub screw. It has also been changed to the double Z-bend,
clamped by terminal block parts. Camcorder problem fixed - found a hidden switch.
I have updated the firmware in four new Globalsat BR-355 S4, including applying the patch (www.gpss.co.uk/rbpatch.zip), setting Static Navigation OFF, and setting
to NMEA at 4800 with only $GPRMC sentences. See documentation near end of
BlogX. I did find that cable, but only after returning from Maplins (and Bray Lake)
with parts to make up the cable ! I've ordered another SPOT Trace, at 84 GBP delivered from Globaltelesatcoms.
I put together a Picaxe 08M2 / BR-355 S4 based Autopilot, and this is now in Boat 11, loaded with AUTOP10.BAS.
 Monday 14th November:
As is often the case, it's not the technical stuff that requires time: click on that picture on the right.
An enormous crack has appeared, in the weeks that Boat 11 was left in the back garden. It seems that
the fibreglass deck, so carefully put down, and glued with fast-glass resin to the original fibreglass hull,
may have lifted, allowing water to seep in to the foam that fills the hull. There is probably no alternative
than to strip off the whole lot, including the solar panels - tempting as it may seem to simply fill the crack.
Fedex just delivered the spare SPOT Trace, ordered from Globaltelesatcoms, so now I can risk modification
to the one I have. e.g. drilling into the case to supply 5v power from external solar power.
Monday 14th November:
As is often the case, it's not the technical stuff that requires time: click on that picture on the right.
An enormous crack has appeared, in the weeks that Boat 11 was left in the back garden. It seems that
the fibreglass deck, so carefully put down, and glued with fast-glass resin to the original fibreglass hull,
may have lifted, allowing water to seep in to the foam that fills the hull. There is probably no alternative
than to strip off the whole lot, including the solar panels - tempting as it may seem to simply fill the crack.
Fedex just delivered the spare SPOT Trace, ordered from Globaltelesatcoms, so now I can risk modification
to the one I have. e.g. drilling into the case to supply 5v power from external solar power.
Tuesday 15th November:
Terry visited to discuss his "GPS Simulator" work. Gave him a BR355-S2. His is USB, not serial.
Patch ZIP URL now above.
![]()
Wednesday 16th November:
 Soldered up another Picaxe 08M2 Autopilot, but with the later Globalsat BR-355 S2 GPS. It all fits in the lid
of a plastic pill box, the remainder simply acting as a "stand" to keep it above any water that gets into
the main box of electronics. The only difference
with Autopilots in earlier years is the GPS, and a minor Autoplilot Software change.
AUTOP10.BAS 18th October 2016, is based on AUTP9TTS used in earlier Trans-Atlantic attempts.
The startup speech says "18 October", and limiting of rudder bias is removed.
This is now in Eric's IOM Boat 12, for tests on Bray Lake. Another 08M2-BR355-S2 Autopilot
was squeezed into little Affinity, and the failed servo replaced.
This 08M2 based autopilot will be given a good testing, as the "minimum change" solution.
We can quickly swap to the the Picaxe 28X2 Autoplot, that has "a lot to say for itself",
for demonstrations to journalists.
There is plenty enough other work on Boat 11
to keep us busy ! :-)
Soldered up another Picaxe 08M2 Autopilot, but with the later Globalsat BR-355 S2 GPS. It all fits in the lid
of a plastic pill box, the remainder simply acting as a "stand" to keep it above any water that gets into
the main box of electronics. The only difference
with Autopilots in earlier years is the GPS, and a minor Autoplilot Software change.
AUTOP10.BAS 18th October 2016, is based on AUTP9TTS used in earlier Trans-Atlantic attempts.
The startup speech says "18 October", and limiting of rudder bias is removed.
This is now in Eric's IOM Boat 12, for tests on Bray Lake. Another 08M2-BR355-S2 Autopilot
was squeezed into little Affinity, and the failed servo replaced.
This 08M2 based autopilot will be given a good testing, as the "minimum change" solution.
We can quickly swap to the the Picaxe 28X2 Autoplot, that has "a lot to say for itself",
for demonstrations to journalists.
There is plenty enough other work on Boat 11
to keep us busy ! :-)
17th November:
Soldered up the expensive but essential Parallax Emic-2 Text-To-Speech (TTS) board.This time
the loudspeaker and Emic-2 were mounted inside a plastic cap, sealed with silicon sealant,
after wrapping the board in plastic.
The test with a 28X2 Autopilot spoke "Terry's stoopid test program" (see 15th November above)
so I reloaded AP28X2F.BAS.
 18th November:
Eric's IOM Boat 12 was given a Bray Lake Test, to check out the modified 08M2 Autopilot. Click on the pictures to see the details.
It was not intentional, but the results showed clearly what happens if the sails are not trimmed correctly.
Normally sail booms on both Jib and Mainsail are about 30 degrees from centre.
The Jib was at 20 and the Mainsail at 40, resulting in "Lee Helm", and the steering failed to turn
the boat against the wind, towards the waypoint. The first attempt caused Waypoint "D" to be hit,
so the boat returned to "Base" - at about 1.85 knots, cross wind. It was re-lauched immediately,
eventually hit waypoint "A", but ended up needing a rescue off the island.
Next attempt will be with the sails
trimmed correctly !
18th November:
Eric's IOM Boat 12 was given a Bray Lake Test, to check out the modified 08M2 Autopilot. Click on the pictures to see the details.
It was not intentional, but the results showed clearly what happens if the sails are not trimmed correctly.
Normally sail booms on both Jib and Mainsail are about 30 degrees from centre.
The Jib was at 20 and the Mainsail at 40, resulting in "Lee Helm", and the steering failed to turn
the boat against the wind, towards the waypoint. The first attempt caused Waypoint "D" to be hit,
so the boat returned to "Base" - at about 1.85 knots, cross wind. It was re-lauched immediately,
eventually hit waypoint "A", but ended up needing a rescue off the island.
Next attempt will be with the sails
trimmed correctly !
19th November 2016:
 Lots of SPOT Trace experimental work will be found in
BlogX.
In brief: SPOT Trace is a much neater solution than our modified SPOT Messenger that I've used for years.
I'd used two NiMe AA cells, each giving ~1.82v fully charged.
Now is the time to risk blowing at least one SPOT Trace up, in our quest for a simple and robust solution.
Don't forget that we are not using the manufacturer's reccomended batteries ! Click on pictures to expand.
My approach was to replace the two 2M screws that hold the USB socket cover, by two 2M studs, soldered to the
power pads. Nuts and washers clamp the cover on, but now we can access the power. I used a 1.5mm drill to get
through the plastic, but I also had to remove some plastic from where the two springs come from the 4 x AAA
battery holder. Now when the SPOT Trace is assembled, you can measure the voltage of any internal batteries,
and supply external (solar) power. It might be sensible to try 4 AAA NiMH cells, that fully charge to only 5.6v.
However, "being sensible" was never my strong point, so let me try 4 AAA NiMe cells, giving nearer 1.82x4 = 7.28v.
... Mercifully, I had not fully charged the NiMe cells, and the voltage rapidly dropped. I put in 4 x AAA NiMH Maplin cells,
and connected a female Futaba connector, so the SPOT Trace could easily have a small solar panel plugged in.
This is now in the car, until I can find a better way of stimulating transmissions with movement.
Lots of SPOT Trace experimental work will be found in
BlogX.
In brief: SPOT Trace is a much neater solution than our modified SPOT Messenger that I've used for years.
I'd used two NiMe AA cells, each giving ~1.82v fully charged.
Now is the time to risk blowing at least one SPOT Trace up, in our quest for a simple and robust solution.
Don't forget that we are not using the manufacturer's reccomended batteries ! Click on pictures to expand.
My approach was to replace the two 2M screws that hold the USB socket cover, by two 2M studs, soldered to the
power pads. Nuts and washers clamp the cover on, but now we can access the power. I used a 1.5mm drill to get
through the plastic, but I also had to remove some plastic from where the two springs come from the 4 x AAA
battery holder. Now when the SPOT Trace is assembled, you can measure the voltage of any internal batteries,
and supply external (solar) power. It might be sensible to try 4 AAA NiMH cells, that fully charge to only 5.6v.
However, "being sensible" was never my strong point, so let me try 4 AAA NiMe cells, giving nearer 1.82x4 = 7.28v.
... Mercifully, I had not fully charged the NiMe cells, and the voltage rapidly dropped. I put in 4 x AAA NiMH Maplin cells,
and connected a female Futaba connector, so the SPOT Trace could easily have a small solar panel plugged in.
This is now in the car, until I can find a better way of stimulating transmissions with movement.


 Tuesday 22nd November:
Eric's IOM Boat 12 has it's sails trimmed to the more normal settings of both Jib and Mainsail booms being 30 degrees
from centre. The results were much better, with three Bray Lake Tests being done in rapid succesion, within the hour.
Two tests did the whole trip, Base-A-B-C-D-Base, but the third cut it short, Base-D-Base, after hitting D by accident.
Click on the pictures to expand them or play the 10 minute video. Smaller adjustments are still needed
to the sailing balance of the boat, to reduce that "wobble" in the path cross-wind.
Tuesday 22nd November:
Eric's IOM Boat 12 has it's sails trimmed to the more normal settings of both Jib and Mainsail booms being 30 degrees
from centre. The results were much better, with three Bray Lake Tests being done in rapid succesion, within the hour.
Two tests did the whole trip, Base-A-B-C-D-Base, but the third cut it short, Base-D-Base, after hitting D by accident.
Click on the pictures to expand them or play the 10 minute video. Smaller adjustments are still needed
to the sailing balance of the boat, to reduce that "wobble" in the path cross-wind.
Wednesday 23rd November: Text-To-Speech box moved to below Mobius camera, so it will be heard on video better.

 Sunday 27th November 2016:
Boat 11 had 0.4 kg of bad deck removed: it consisted of fibre glass mat and Fastglass resin which had not bonded
to the fibreglass hull, but had simply lifted away. See the cracked paint photo on 14th November above. Rig removed
and hull left upside-down to let some water drip out ! Purchased at �30, from friendly Penton Hook Marina, a West System Epoxy
Glass Fibre Boat Repair Kit. Sanded F/G areas and then put whole hull into our boiler cupboard, to warm it up and dry it.
After an hour it was taken out and new fibreglass laid down with the West System epoxy - there is still some left.
Sunday 27th November 2016:
Boat 11 had 0.4 kg of bad deck removed: it consisted of fibre glass mat and Fastglass resin which had not bonded
to the fibreglass hull, but had simply lifted away. See the cracked paint photo on 14th November above. Rig removed
and hull left upside-down to let some water drip out ! Purchased at �30, from friendly Penton Hook Marina, a West System Epoxy
Glass Fibre Boat Repair Kit. Sanded F/G areas and then put whole hull into our boiler cupboard, to warm it up and dry it.
After an hour it was taken out and new fibreglass laid down with the West System epoxy - there is still some left.
Monday 28th November 2016:
Epoxy had dried well overnight, so gave the new deck a coat of white International Perfection, from that left in an old can.
It will be covered by sealant to glue down solar panels.
 Tuesday 29th November 2016:
Purchased three lengths of 2mm brass rod from Mantua Models as 5v power rails, for below the duplicated 6v solar panels.
Replaced three bolts in rear box by larger nuts and bolts to pass power into the box. Next task will be to prepare the four solar panels:
each with isolation diodes and good water protection with epoxy and yacht varnish.
After soldering to the rails, they will then be glued to the deck with a liberal ammount of silicon sealant.
Tuesday 29th November 2016:
Purchased three lengths of 2mm brass rod from Mantua Models as 5v power rails, for below the duplicated 6v solar panels.
Replaced three bolts in rear box by larger nuts and bolts to pass power into the box. Next task will be to prepare the four solar panels:
each with isolation diodes and good water protection with epoxy and yacht varnish.
After soldering to the rails, they will then be glued to the deck with a liberal ammount of silicon sealant.
Wednesday 30th November 2016:
Isolation diodes ( two in parallel for redundancy ) and tinned multicore copper wire was soldered to the four solar panels and they
were given a quick test outside in rare sunlight: ~ 6.5v o/c and > 200mA s/c.
 They were then soldered to the power rails,
the two rear being on RHS and the two at front on LHS. New soldered joints were covered in West System epoxy.
The underside of the solar panels was pained with yacht varnish. When dry, clear silicon sealant was smeared all over.
They were then soldered to the power rails,
the two rear being on RHS and the two at front on LHS. New soldered joints were covered in West System epoxy.
The underside of the solar panels was pained with yacht varnish. When dry, clear silicon sealant was smeared all over.
 Thursday 1st December 2016:
The solar panels were glued to the deck with silicon sealant, and held down with full bottles of wine - to be emptied later ;-)
Thursday 1st December 2016:
The solar panels were glued to the deck with silicon sealant, and held down with full bottles of wine - to be emptied later ;-)
Friday 2nd December 2016:
Spent some time with experimental AP28X2G software, a "hybrid" which attempts to combine the advantages of GPS-Only and Compass steering.
This is reported in
BlogX.
Our fall-back is still the trusty Picaxe 08M2 with later Globalsat BR-355 S2, loaded with Autopilot software AUTOP10.
The old rig with rumpled sails and faded flag was put back on Boat 11. Time to make a new rig with those spare sails from Frank ?
 Sunday 4th December 2016:
After lots of materials shopping yesterday at Slough Radio Control Models, Model Junction, and Maplins, the main Autopilot 5v power
switch was duplicated, using a Maplin IP67 Toggle Switch DPTT (N25KA) protected by a rubber Toggle Switch Cover (YL01B).
Extra protection is provided by the soft drink bottle top, shaped on June's electric cooker hob (smoke did not quite trigger the alarm).
Other materials include carbon fibre and brass rods and tubes, for things like the rig and non-ferrous rudder linkage.
Note the change of marker pen "artwork" on the bottle tops, to provide a rearward looking friendly face.
Sunday 4th December 2016:
After lots of materials shopping yesterday at Slough Radio Control Models, Model Junction, and Maplins, the main Autopilot 5v power
switch was duplicated, using a Maplin IP67 Toggle Switch DPTT (N25KA) protected by a rubber Toggle Switch Cover (YL01B).
Extra protection is provided by the soft drink bottle top, shaped on June's electric cooker hob (smoke did not quite trigger the alarm).
Other materials include carbon fibre and brass rods and tubes, for things like the rig and non-ferrous rudder linkage.
Note the change of marker pen "artwork" on the bottle tops, to provide a rearward looking friendly face.
Monday 5th December 2016:
We have a problem getting our trusty Humberston Signs sticky letters to stick onto the nice new "Atlantic" IOM #3 sails from Frank of Nylet.
I've used this combination on all Snoopy's boats for years, but it seems the sails are now protected.
I tried superglue, but that didn't help.
 I did one side, followed by a thin cover of clear silicon sealant, which may hold
the letters down. On the other side, I tried Bostick on the "ROBOT BOAT", but that was no better.
However, I also covered this with clear silicon sealant.
I did one side, followed by a thin cover of clear silicon sealant, which may hold
the letters down. On the other side, I tried Bostick on the "ROBOT BOAT", but that was no better.
However, I also covered this with clear silicon sealant.
Tuesday 6th December 2016:
I tried cleaning the sail with June's Tesco Nail Polish Remover, then applying the "GPSS.CO.UK" direct - no better.
Hopefully I can find a work-around.
Looks as if we may then be doing weather tests, as we did years ago, with samples of labelled sail attached to our car roof rack.
My last order from Humberston Signs / Snappygrafix was early in 2016, and Steve sent me a free Snoopy sticker.
I've yet to decide where to stick it, but I expect my wife June will suggest somewhere ! :-)
![]()
 Thursday 19th January 2017:
Background "experimental" work, on things like the SPOT Trace tracker power, and navigation light, is reported in
BlogX
.
Today the carbon fibre tube for the mast and sail booms arrived from East Coast Fibreglass Supplies
(
www.ecfibreglasssupplies.co.uk
) :
two 2m lengths of c/f tube, 8mm OD and 4.7mm ID. Brass tube already purchased from model shops was
a nice sliding fit. The mast c/f tube length was cut to 105cm, with 10cm below deck. The top of the mast
is ~ 95 cm above the deck, and the mainsail boom is about 10cm. The boom length is 32cm.
A triangle of brass sheet was cut, using the wife's scissors, and her kitchen hob heated the brass assembly
for soldering. This holds the boom at 90 degrees to the mast, and was then filled with scrap plywood
and Isopon P40. A hole was drilled to assist lacing of the mainsail.
Wickes SCREW EYES 45 x 10mm, with a little duck tape, were a push fit into the c/f tube, at top of mast
and end of mainsail boom.
Thursday 19th January 2017:
Background "experimental" work, on things like the SPOT Trace tracker power, and navigation light, is reported in
BlogX
.
Today the carbon fibre tube for the mast and sail booms arrived from East Coast Fibreglass Supplies
(
www.ecfibreglasssupplies.co.uk
) :
two 2m lengths of c/f tube, 8mm OD and 4.7mm ID. Brass tube already purchased from model shops was
a nice sliding fit. The mast c/f tube length was cut to 105cm, with 10cm below deck. The top of the mast
is ~ 95 cm above the deck, and the mainsail boom is about 10cm. The boom length is 32cm.
A triangle of brass sheet was cut, using the wife's scissors, and her kitchen hob heated the brass assembly
for soldering. This holds the boom at 90 degrees to the mast, and was then filled with scrap plywood
and Isopon P40. A hole was drilled to assist lacing of the mainsail.
Wickes SCREW EYES 45 x 10mm, with a little duck tape, were a push fit into the c/f tube, at top of mast
and end of mainsail boom.
Friday 20th January 2017:
The jib with a c/f boom was added, but without the sticky letters. I placed a repeat order
with Humberston Signs, because our "Christmas tidy-up" seems to mislaid the latest, stickier versions.
![]()

 Monday 23rd January 2017:
Click on the pictures to enlarge: they show the final Boat 11 Navigation Light system,
before glueing it to the deck with white silicon sealant. The upside-down plastic wine glass
is mounted on the sawn off top of the beer glass, to surround the 3 x AA NiMH cells and electronics.
CCTV showed the light still glowing faintly after 12 hours on.
To the right you see where the SPOT Trace sits in the waterproof box, with the dedicated
small solar panel on the side, facing a low sun when travelling westward.
Monday 23rd January 2017:
Click on the pictures to enlarge: they show the final Boat 11 Navigation Light system,
before glueing it to the deck with white silicon sealant. The upside-down plastic wine glass
is mounted on the sawn off top of the beer glass, to surround the 3 x AA NiMH cells and electronics.
CCTV showed the light still glowing faintly after 12 hours on.
To the right you see where the SPOT Trace sits in the waterproof box, with the dedicated
small solar panel on the side, facing a low sun when travelling westward.
 Tuesday 24th January 2017:
The sticky text arrived, and despite not being quite sticky enough for Frank's sails, they should stay down
after I covered them with clear silicon sealant. The Snoopy cartoon sits proudly on the hull,
and Boat 11 is now outside, to see how the solar power systems behave. The boat is now ready
for Bray Lake Tests, with minor tasks to do, like install the I-GotU GPS logger and batteries.
Tuesday 24th January 2017:
The sticky text arrived, and despite not being quite sticky enough for Frank's sails, they should stay down
after I covered them with clear silicon sealant. The Snoopy cartoon sits proudly on the hull,
and Boat 11 is now outside, to see how the solar power systems behave. The boat is now ready
for Bray Lake Tests, with minor tasks to do, like install the I-GotU GPS logger and batteries.
Thursday 26th January 2017:
The main 5v power for the autopilot will be supplied, as in earlier years, by duplicated solar panels
and N-MH packs. This time I am using Maplin AA 2400mAH cells, and putting each 4 cell pack in parallel.
i.e. duplicated 4800 mAH power -> 9600mAH total. Four 4 cell packs were soldered up and glued together
in a messy manner: super glue, silicon sealant, and Fastglass resin.
 Friday 27th January 2017:
The four Ni-MH packs were put inside the box and wired into the three terminals providing duplicated solar power.
The two sides were brought together by two pairs of diodes in parallel, for redundancy, to a fourth bolt
as a 5v power monitor point. e.g. 5.06v final 5v output after diodes from 5.48v.
A holder was made for the I-GotU GPS Logger, which plugs into a USB socket lead, soldered to the 5v output.
The boat was put outside at 1830 to see how well the solar powered light works: we expect some sun tomorrow !
Friday 27th January 2017:
The four Ni-MH packs were put inside the box and wired into the three terminals providing duplicated solar power.
The two sides were brought together by two pairs of diodes in parallel, for redundancy, to a fourth bolt
as a 5v power monitor point. e.g. 5.06v final 5v output after diodes from 5.48v.
A holder was made for the I-GotU GPS Logger, which plugs into a USB socket lead, soldered to the 5v output.
The boat was put outside at 1830 to see how well the solar powered light works: we expect some sun tomorrow !
 Saturday 28th January 2017:
Boat 11 was weighed and was only 11.74 kg !
Compare this with Boat 10 at 15.9 kg in
Blog5
- same size but with LOTS of repairs.
I measured the waterproof box on Boat 11 to be 20cm long x 16cm wide x 10cm high, but saw that I have two
spare boxes, 23.5cm L x 19cm W x 11cm H.
Blog2
clearly shows that our last Boat9/Boat10 had the smaller box, Described as
"FIBOX TA201610T Enclosure", when the boat had a major rebuild in February 2014.
See old picture on left.
Think of all those Atlantic Attempts it survived, 2013 ... 2016. No wonder it ended up being so heavy !
Saturday 28th January 2017:
Boat 11 was weighed and was only 11.74 kg !
Compare this with Boat 10 at 15.9 kg in
Blog5
- same size but with LOTS of repairs.
I measured the waterproof box on Boat 11 to be 20cm long x 16cm wide x 10cm high, but saw that I have two
spare boxes, 23.5cm L x 19cm W x 11cm H.
Blog2
clearly shows that our last Boat9/Boat10 had the smaller box, Described as
"FIBOX TA201610T Enclosure", when the boat had a major rebuild in February 2014.
See old picture on left.
Think of all those Atlantic Attempts it survived, 2013 ... 2016. No wonder it ended up being so heavy !
 Sunday 29th January 2017:
The box lid artwork was kept simple, following those classic KISS Principles:
Keep It Simple, Stupid !
from Snoopy's
Design
page.
Tests on the new navigation light showed it not staying on for more than a few hours,
even after a sunny day. The three highly discharged 2000mAH AA cells were replaced by fully charged 2400mAH Ni-MH cells,
but these faded too.
Sunday 29th January 2017:
The box lid artwork was kept simple, following those classic KISS Principles:
Keep It Simple, Stupid !
from Snoopy's
Design
page.
Tests on the new navigation light showed it not staying on for more than a few hours,
even after a sunny day. The three highly discharged 2000mAH AA cells were replaced by fully charged 2400mAH Ni-MH cells,
but these faded too.
Tuesday 31st January 2017:
The 9 LED assembly was replaced by the lower power 3 LED one, used in recent years.
However, the same two solar panels, switching electronics, and 3 x AA 2400 mAH Ni-MH cells
were retained, rather than the 2 x AA 2000 MAH cells. This all fitted within
the upturned plastic wine glass and was bright when switched on at 1800.
 Thursday 2nd February 2017:
The lamp now works well enough: was still bright at 0730 after over 20 hours on. Dropped by 0.5v from 4.12v to ~ 3.6v in 12 hours.
Put outside in overcast conditions, to see how well the two small solar panels work. Autopilot "work" will be reported in
BlogX. e.g. latest 08M2 based autopilot and the new "Hybrid" 28X2 version.
Thursday 2nd February 2017:
The lamp now works well enough: was still bright at 0730 after over 20 hours on. Dropped by 0.5v from 4.12v to ~ 3.6v in 12 hours.
Put outside in overcast conditions, to see how well the two small solar panels work. Autopilot "work" will be reported in
BlogX. e.g. latest 08M2 based autopilot and the new "Hybrid" 28X2 version.
Friday 3rd February 2017:
Boat 11 is ready for Bray Lake Tests with a Picaxe 08M2 Autopilot loaded with AUTOP10.BAS. For details see "BlogX" above.
Saturday 4th February 2017:
The same test equipment will be used on Bray Lake as in previous years: 1) the Text-To-Speech (TTS) that makes the Autopilot talk.
2) the FM-transmitter "bug" that permits this to be heard on a transistor radio back on the shore. 3) the GPS Logger that records
position and speed every second, onto an SD card, for GPS plots and analysis. 4) A Mobius camera to record video
and speech on the boat. The TTS with it's loudspeaker was placed at the front of the box. 4 screw hooks were fixed into the deck,
and a piece of light weight plywood waterproofed with fastglass resin and paint. The mainsail boom JUST misses the camera.
Two large elastic bands hold the FM Transmitter bug and GPS Logger boxes.
A minor software change was made to AUTOP10.BAS for the Picaxe 08M2 Autopilot, adopting the same voice as that in AP28X2G.BAS.
i.e. louder, higher pitched, and faster. The only other change was the startup words, "4th of Feb 2017" instead of the old
"18th October" (2016). I try to avoid software changes, but we should hear clearer speech.
 Saturday 4th March 2017:
Snoopy's extended Team-Joker expands, and takes on a wider role, trying to spread a little "Peace and Understanding" in the World,
and applying smart car and drone technology into robotics for the elderley outside and inside the home.
Saturday 4th March 2017:
Snoopy's extended Team-Joker expands, and takes on a wider role, trying to spread a little "Peace and Understanding" in the World,
and applying smart car and drone technology into robotics for the elderley outside and inside the home.
But it's not just high ideals: Roy's discovery of the MicroMite, "PC on a chip", could have massive positive impact on robotics,
including having fun with robot sailing boats, Worldwide. There is enourmous synergy, between the MicroMite and Robin's Pocket PC
based GPSSppc. The iPAQ based GPSSPPC.EXE is not open source, but it DOES have an open Autopilot, documented for years on
this site. In short, the user adds a text file, with the correct name, to specify the waypoints of the mission, for anywhere
in the World. e.g. Sea, or even just a small local lake, used by Grumpy old Pensioners, to sail model boats.
e.g. Goldsworth Park on
Eric's Page
.
Three things coincided, to make things happen very fast, in a little more than three weeks:
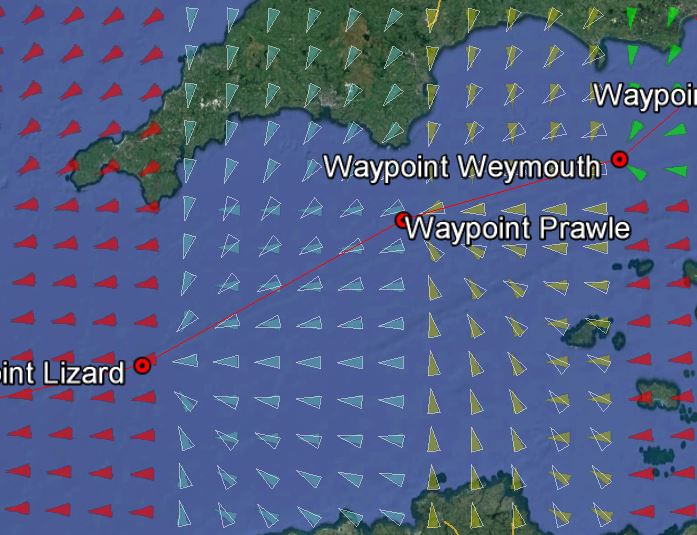
Wednesday 5th April 2017: That's Snoopy's next Atlantic Boat 11 below. The video shows Aleksey's Sailing Saucer, sharing Bray Lake on 5th April 2017. We needed more wind ! This was Boat 11's first test this year, starting with our trusty Picaxe 08M2 Autopilot. The video shows that we did not have enough wind, it being less than 5mph from the North-West. The GPS logger worked OK - I just needed a better SD card reader on my PC - see the GPS plot below. The boat hit Waypoint C by accident, possibly because the wind dropped and/or shifted. However, it still returned to Base well enough, so will be taken out again soon. We may also take Aleksey's Sailing Saucer, for a bit of fun :-)
![]()

![]()
Thursday 13th April 2017: Another Bray Lake Test and still not much wind, but this time it completed the route, and in 30 minutes. This time the jib was let out to the normal 30 degrees, like the mainsail. It had been ~ 15 degrees, and the resulting Lee Helm may be why Wednesday's test hit Waypoint C by accident. The boat balance looks OK, so we are now ready to try the Picaxe 28X2 GPS + Compass "Hybrid" Autopilot, instead of the old 08M2 "GPS-Only" one. Click on the GPS Plot and/or play the video.
![]()
 Friday 14th April 2017: We still have unsolved problems with our SPOT Trace tracker.
See the modifications reported on 19th November 2016 above.
Our problem has always been to adequately test the power modifications,
because of the logic inside the SPOT Trace firmware.
e.g. it staying in a low power "sleep" mode until it is shaken and moves tens of metres/yards.
The biggest problem is that it will switch off if the power drops below an unknown voltage.
I was reminded of this again by seeing that the SPOT Trace in my car had switched off again.
It had sent a "low power" email on 4th April. The small solar panel has now raised it to 5.49v,
but it still considers this as "low". We have 4 x NiMe cells inside, which could be limiting
it to 5.6v, so these have been removed. I temporarily added an external 5 NiMH packe at 6.41v,
boosting the Maplin pack to 6.33v. The small "6v" 115mmx70mm solar panel is giving 6.14v O/C
under a bright cloudy sky. This SPOT Trace is set to report every 5 minutes, at maximum rate,
to consume 4x (?) more power than if every 20 minutes. After two 25 minute trips, seperated
by an hour, voltage had dropped from 6.33v to 5.14v and the last report said battery state was
"LOW" instead of "GOOD".
A shopping trip, with 8 position reports dragged the voltage down to 4.39v, recovering to 4.56v
in 15 minutes ( overcast ).
Friday 14th April 2017: We still have unsolved problems with our SPOT Trace tracker.
See the modifications reported on 19th November 2016 above.
Our problem has always been to adequately test the power modifications,
because of the logic inside the SPOT Trace firmware.
e.g. it staying in a low power "sleep" mode until it is shaken and moves tens of metres/yards.
The biggest problem is that it will switch off if the power drops below an unknown voltage.
I was reminded of this again by seeing that the SPOT Trace in my car had switched off again.
It had sent a "low power" email on 4th April. The small solar panel has now raised it to 5.49v,
but it still considers this as "low". We have 4 x NiMe cells inside, which could be limiting
it to 5.6v, so these have been removed. I temporarily added an external 5 NiMH packe at 6.41v,
boosting the Maplin pack to 6.33v. The small "6v" 115mmx70mm solar panel is giving 6.14v O/C
under a bright cloudy sky. This SPOT Trace is set to report every 5 minutes, at maximum rate,
to consume 4x (?) more power than if every 20 minutes. After two 25 minute trips, seperated
by an hour, voltage had dropped from 6.33v to 5.14v and the last report said battery state was
"LOW" instead of "GOOD".
A shopping trip, with 8 position reports dragged the voltage down to 4.39v, recovering to 4.56v
in 15 minutes ( overcast ).
Sunday 16th April 2017:
Home after a family day out. SPOT Trace at 5.77v Had switched off on 14th. Only two reports on 15th.
Any lateral thinking about testing out there ? :-)
Monday 17th April 2017:
Andy in Bratislava sent some brilliant design advice, and I've put it into the bottom of
BlogX
because I've not yet diagnosed exactly what is happening, and what the simplest solution is
- particularly how to test it.
Today, after a run out to Slough and back, the voltage was 5.89v, but not one position report
had been made since yesterday. It seems I may need to connect via a USB cable to the PC,
to reset the 5 minute settings: not so easy after I put in those two bolts !
![]()
 Tuesday 18th April 2017:
It was a challenge to find all the relevant bits, and I considered making a new "Hybrid" Autopilot from
components, including Picaxe 28X2 Module, Globalsat BR355-S2, and Devantech CMPS10 ( or CMPS11 ) tilt
compensated compass. I ended up using one of the early prototype boards, stripping out the superfluous
power switching components ( for servo and GPS ) and trimming the board down to a little over 3.7" x 1.6"
( 9.4cm x 4cm ). That very magnetic TTS loudspeaker is uncomfortably close to the compass,
so I'll probably put it outside the box. It was not that easy finding somewhere to test the system
inside the house or garden, away from things that influence a compass. We are not far from a Bray Lake Test.
Click on the picture to enlarge.
Tuesday 18th April 2017:
It was a challenge to find all the relevant bits, and I considered making a new "Hybrid" Autopilot from
components, including Picaxe 28X2 Module, Globalsat BR355-S2, and Devantech CMPS10 ( or CMPS11 ) tilt
compensated compass. I ended up using one of the early prototype boards, stripping out the superfluous
power switching components ( for servo and GPS ) and trimming the board down to a little over 3.7" x 1.6"
( 9.4cm x 4cm ). That very magnetic TTS loudspeaker is uncomfortably close to the compass,
so I'll probably put it outside the box. It was not that easy finding somewhere to test the system
inside the house or garden, away from things that influence a compass. We are not far from a Bray Lake Test.
Click on the picture to enlarge.
Wednesday 19th April: Late yesterday an important fault was found and corrected with the SPOT Trace 6v battery pack. That soldered up 5 x NiMH AA Maplin 2000mAH pack was replaced by a "2600" 6 x NiMH AA pack, and results from a road test were dramatic: still 6.78v after 16 reports every 5 minutes. Tests confirmed the old pack was faulty. Our SPOT Trace power solution for now will be the new 2600 Pack, plus a diode from the 5v Autopilot supply, to reduce risk of the 6v SPOT Trace power dropping too low.
Bray Lake Test of "Hybrid" Picaxe 28X2 + BR355-S2 GPS + CMPS11 Compass was in very light and variable wind, but
it shows a bug in the Autopilot Software.
Thursday 20th April 2017: It took hours for my PC to process the video from the cameras, including an hour from the Mobius camera,
and I now have this on two archive DVD. I thought it worth the time to make this much shorter youtube video. It shows why I've repositioned
Bray Lake Test equipment: the FM sound transmitter is now at the rear of the box, so not too close to the TTS. The Mobius video
will be valuable in identifying software changes to the "Hybrid" Autopilot. e.g. fixing bugs, adjusting steering logic, and
speaking information to help test analysis.
The GPS Plot is of the file recorded by the Ardulog GPS logger:
rb190417.nme".
Click on images below to enlarge or play the video.
![]()
![]() Saturday 22nd April 2017: Yesterday's Bray Lake Tests by Robin and Dick concluded with a sailing test of Dick's Mavic Drone.
The two minute video below provides the evidence of Robin's (alleged) initiation of the test. More detail will be added here in due course,
but - in brief - the compass based steering failed miserably. Tests this morning seem to confirm the problem can be solved easily, by
the 5v power wiring, rather than some difficult software change. The good news was that snipping the compass power wire made the Autopilot
software ( AP28X2G.BAS version "Golf" 20th April 2017 ) switch correctly to the old "GPS Only" steering logic.
That GPS Plot is in
rb210417.nme including time and speeds.
Click on the pictures below
to play the video or enlarge them. The tea tray shows testing with a Y-lead, to power servo and Autopilot from seperate 5v supplies.
Random compass errors then disappeared. A voltmeter revealed 5v power had dropped to 4.5v ! Solution: replace those soldered 5v packs
and don't rely on a boat kept indoors to retain it's charge !
Saturday 22nd April 2017: Yesterday's Bray Lake Tests by Robin and Dick concluded with a sailing test of Dick's Mavic Drone.
The two minute video below provides the evidence of Robin's (alleged) initiation of the test. More detail will be added here in due course,
but - in brief - the compass based steering failed miserably. Tests this morning seem to confirm the problem can be solved easily, by
the 5v power wiring, rather than some difficult software change. The good news was that snipping the compass power wire made the Autopilot
software ( AP28X2G.BAS version "Golf" 20th April 2017 ) switch correctly to the old "GPS Only" steering logic.
That GPS Plot is in
rb210417.nme including time and speeds.
Click on the pictures below
to play the video or enlarge them. The tea tray shows testing with a Y-lead, to power servo and Autopilot from seperate 5v supplies.
Random compass errors then disappeared. A voltmeter revealed 5v power had dropped to 4.5v ! Solution: replace those soldered 5v packs
and don't rely on a boat kept indoors to retain it's charge !
Sunday 23rd April 2017:The video below is replaced by the full story in 11 minutes, including unseen footage of the alleged offence by Robin :-)
![]()

![]() Wednesday 26th April 2017: Yesterday's visit to Bray Lake by Dick and Robin was a great success and the edited video is below,
covering the whole mission, lasting less than 20 minutes from launch until return to Base. The unedited video is also available.
You can use settings to slow down, but still hear what's spoken. Automatic subtitles may soon be available too, depending on Youtube.
In brief: the compass based steering worked, after recharging the 5v batteries, and the next Bray Lake Test will be with the calculated and spoken Course to Steer used.
Before this, we need to analyse the video, particularly from the Mobius camera, looking for unexplained errors in Compass direction and/or Course to Steer.
The next version "India" of the software will then be tested, to see if the "Hybrid" logic gives a straighter path between waypoints. For those helping,
the UNEDITED* camcorder and Mobius video is
here
and the GPS plot is in
RB250417.NME
. New batteries arrived yesterday, for the 5v supply, so the old soldered up Maplin packs will be replaced. The poor quality of sound received
by FM transistor radio on shore, may be explained by the FM Bug or it's microphone. This will be checked too.
Click on pictures to enlarge them or play the edited video.
Wednesday 26th April 2017: Yesterday's visit to Bray Lake by Dick and Robin was a great success and the edited video is below,
covering the whole mission, lasting less than 20 minutes from launch until return to Base. The unedited video is also available.
You can use settings to slow down, but still hear what's spoken. Automatic subtitles may soon be available too, depending on Youtube.
In brief: the compass based steering worked, after recharging the 5v batteries, and the next Bray Lake Test will be with the calculated and spoken Course to Steer used.
Before this, we need to analyse the video, particularly from the Mobius camera, looking for unexplained errors in Compass direction and/or Course to Steer.
The next version "India" of the software will then be tested, to see if the "Hybrid" logic gives a straighter path between waypoints. For those helping,
the UNEDITED* camcorder and Mobius video is
here
and the GPS plot is in
RB250417.NME
. New batteries arrived yesterday, for the 5v supply, so the old soldered up Maplin packs will be replaced. The poor quality of sound received
by FM transistor radio on shore, may be explained by the FM Bug or it's microphone. This will be checked too.
Click on pictures to enlarge them or play the edited video.
![]()
Friday 28th April 2017: Yesterday's Bray Lake Tests of version "India" of the Hybrid autopilot software,
showed a bug in calculation of Course To Steer (CTS) : The boat started well, using compass steering towards Waypoint Alpha,
and correcting to the right to compensate for sideways drift due to 10 mph wind of about 0.3 mph.
But halfway to Alpha the steering failed miserably, and the boat steered east, to that end of the lake.
We then switched off the compass, and Snoopy did the Bray Lake Test OK, but showed improvement needed to boat sailing balance,
that might be fixed easily with a small forward keel extention. Snoopy's earlier Boat10 was MUCH heavier, and slower to turn,
and so did not suffer from things like that zig-zag seen returning from Waypoint C to D. Less Lee Helm would improve natural tacking.
See the GPS Plot below, based on data in
rb270417.nme.
But first we must correct the software, to version "Juliet",
ready for another Bray Lake Test. Course to Steer (CTS) will also be spoken more often, so we can check all values calculated,
every 12 seconds, instead of every minute. e.g. looking at that velocity triangle on the GPS Plot below, if the GPS showed that
the boat was moving in direction 190, instead of 200, directly towards Alpha, we should hear "Steer 210".
The youtube video below is for analysis and entertainment.
As with all youtube videos, automatic subtitles can be switched on with the control in the low right.
We may try a different Text-To-Speech voice, since Youtube does not recognise Snoopy's speech as well as humans.
Much of the video will be boring, but some may like the start and end - if not our wives ;-)
Later update:
Above is now on
Snoopy page. Good news is that tests can be done on the tea tray, before in a boat on Bray Lake. After bug* fix, need to think about
cases where GPS Course slows towards zero.
Good progress was made on version Juliet, but it was "system" level work: avoiding interference between GPS/Compass/TTS/Picaxe etc.
The new tea-tray-test video here is to test how well youtube recognises the deeper autopilot voice, to automatically generate subtitles.
These things can all interact at the Picaxe 28X2 firmware level, so best get it all working reliably, speaking the relevant data,
such as time, compass, GPS, and CTS directions, before we look for software bugs* or system restrictions. Hopefully the subtitles
will become available in hours, as for yesterday's video.
* I may have fixed the problem: not a bug, but the need to limit the steering correction used for CTS based on difference between
GPS heading and target heading. Version "Juliet" now limits the correction to less than 45 degrees.
But testing will tell :-)

![]()
Saturday 29th April 2017:Youtube yet to add subtitles on latest video above: can take days. Middle works on Chrome,
Explorer, Firefox on Win7. Other OS such as Apple, Android, etc ? Tea Tray Tests of version Juliet in progress, on foot, in car,
and in boat(s) soon. Practically there: may be testing in boat next Tuesday.
BUT - I have just been contacted by Roger llewlyn, of Team George & Dragon, offering his two hulls ! Here is where Roger, myself,
and Dick got together at Bray Lake in December 2014. Roger contacted me before Snoopy's 2012 Attempt, and lives just down the road,
near the Sandhurst Military Academy - where Snoopy did an aerial recce years ago ! See you soon Roger ! :-)
Version "Juliet" of the Hybrid Autopilot software seems to be working OK, and is ready for some serious tea tray testing, then Bray Lake.
The final approach adopted was to extend the 7 second GPS-Only Control loop to 30 seconds, where the first part is Compass steering,
directly to the waypoint. It seems to cope with an intermittent compass fault, by use of the switch. The big test will be how straight
it sails between waypoints, in a variety of wind conditions.
Sunday 30th April 2017:
There was a welcome interruption to my Tea Tray Testing of Snoopy's Hybrid Autopilot software by Colin's invitation
to join the new Google groups Microtransat Forum on
groups.google.com/forum/#!forum/microtransat
*: it works brilliantly, and should make communication between us
a lot quicker and easier. * I can remove this public link, or make it more prominent off
Snoopy
page, as Colin wishes.
These pictures below show today's tests of "Juliet". The logic looks good, and is ready
for Bray Lake Test, but there were large compass errors of tens of degrees. First check was easy: load software into
other units to see if it is simply that the compass needs recalibration.
I soon had a second unit, labelled (B)
instead of (A), and tea tray under test - compass worked perfectly: within a degree or two. I also took opportunity
at 1200 GMT ( 1300 local UK BST ) to check sun direction and 180 due south. My "Robin's Corner"
pole lines up with a neighbour's TV antenna and pine a tree. Next job was with a soldering iron, to tidy up
that Autopilot (B) as I had for (A). That can go in the Boat for a Bray Lake Test. We can also see if it
is easy to calibrate that compass in Autopilot (A), after some tea tray tests on compass accuracy,
and to ensure there are no "surprises". It was years since I built them ! Picture on the right is Autopilot (B):
needs more tests but when I pointed it towards "Alpha" it said "Compass 349" - on the button !
So, it's more tea tray tests, to check the hybrid logic properly, then a Bray Lake Test very soon.
On compass calibration, see
CMPS10 Documentation
and
CMPS11 Documentation
. My existing autopilots, including (A) and (B) use the CMPS10. However that is no longer available
and I have CMPS11 waiting to be used on more autopilots.
I will need to see if I wrote software to support the calibration. I do recall needing to rotate through 360 degrees.
It seems this was in July 2014: there is relevant information on Snoopy's old
Compass for Robot Boat
page.
I looked suitably busy when June and Samantha got home from Gatwick Airport. It's a hard life for us blokes when the women are away ;-)
Click on pictures to enlarge.
![]()

![]()
Tuesday 2nd May 2017 Dick just left after a long pub grub then coffee with Team-Joker guys including founder member John. In short: Hybrid Autopilot software version "Juliet" looks good on the tea tray. Compass was more accurate on Autopilot board (B), ( < 3 degrees? ) so that was put into Boat 11 for Bray Lake Test tomorrow ~ 1400 BST. The SPOT Trace link at top of Snoopy page should show us there. Compass errors of ~10 degress were seen on Autopilot board (A), and will be looked at in slower time. e.g. recalibration ? Italian class hosted here tonight, so out with the red wine :-)
Wednesday 3rd April 2017 In brief: a very useful Bray Lake Test by Dick and Robin, with a 10mph wind from the North-East and
the Hybrid Autopilot working well from Base, through Alpha, to Bravo. It then failed miserably, on way to Charlie, and a rescue
was needed - another �5 into the Bray Lake Watersports "drinks kitty". Examination of the boat showed that the rudder servo linkage
had "flipped", putting the rudder at a crazy angle. It looks as if a software fault(s) allows the servo to be occasionaly driven
past it's normal ~45 degree movement, causing this catostrophic mechanical fault to happen. It should not take long to fix,
before another test tomorrow. The GPS plot in
rb030517.nme
, shows the fault happening just as
the boat enters the waypoint Bravo Box, and starts steering towards the south-east, instead of to south west ( Base to Alpha ),
or directly West ( Alpha to Bravo ). Not unexpected, Picaxe Basic must handle all combinations of direction.
Before today's test I added two screw rings into the hull sides, to provide a "lifting handle"
and also side guys for the mast. On way home I got materials to make a better lifting handle.
In the evening I created a new version "Kilo" in AP28X2K.BAS from version "Juliet" and corrected a bug: the compass
steering logic did not limit the rudder throw, as does the GPS-Only steering. This should fix the "rudder flip" problem.
At close of play, version "Kilo" seemed to work, but I heard an occasional "No Compass".
More here tomorrow, including pictures, software progress, maybe video, and another Bray Lake Test.
Thursday 4th April:
The new "Full Monty" video below from yesterday needs to be drastically edited down to nearer 10 minutes from what is 52 minutes.
For those very few like Dick who do play it, please tell me the spoken GMT times of places that I should include, and
where I should exclude - such as inappropriate language :-) I will obviously include the film from launch
at 1319, to Alpha by 1322, to Beta at 1326, until things go wrong at 1328, between Bravo and Charlie.
i.e, the first 10 minutes, but probably cut back a lot. Then a perhaps a minute or two of the rescue,
followed by our discovery of the flipped rudder linkage. This cost me and two computers here a few hours,
in the middle of the night, to line up Mobius and Camcorder videos, do this rough "Full Monty" edit, process,
then upload to Youtube. The software is now version "Kilo" from yesterday, and minor changes have been made
to the boat, such as FM Transmitter back in front of the box, with it's "ground" wire connected to 5v earth.
The loose servo was screwed down and the rudder checked as central.
More later, including results of another Bray Lake Test. Full Monty Video here soon, despite hitting
a problem with Youtube. Temporary work-around is to upload it into my webspace at
www.gpss.co.uk/video/un030517.mp4.
Upload ended at 1110 but when I play it I just get sound and a black screen.
But no need: the full video is below.
Click on pictures to expand.

![]()
Later on Thursday 4th April: Bray Lake Test today was great success: See GPS Plot below. The FM Radio link worked well, so Dick and I could hear details all the way around the lake, in about 37 minutes, most of which was the 16 minutes upwind from Charlie to Delta. We have nice video material, but it is very difficult to edit, lining up that from Mobius and Camcorder. The next youtube video will have to wait, since Dick and I want to do another test tomorrow morning with a small keel at the front of the boat. This should reduce Lee Helm and turning rate, giving a better path. I should be able to add that to the boat this evening, if the wife is watching rubbish on TV ... Not rubbish, but "The Last Kingdom" on BBC I-Player - authentic drama series with Vikings ! Good job it came together quickly, based on an old rudder, and duck tape to retain David's Fast Glass resin in place :-)
![]()
Friday 5th April 2017:
Today's Bray Lake Test of the extra keel at the front showed that it slowed the rate of turn so much that the boat
could not steer. Robin thought it might be a software bug but Dick was right: we tore the extra fin off and the boat
sailed well. Dick also had a simple thing to try next: a temporary keel extention, made of plastic, stuck on with duck tape.
We can easily see how that performs, adjusting it's size and shape, to get the boat balance right. Robin can then
do a more substantial job, using the usual plywood, Fastglass resin, and paint. This will be tested on Bray Lake tomorrow
Morning. Wind was nice and strong from East to North East, at about 10 to 15 mph. The GPS Logger data in
rb050517.nme
is below.
There should be at least an unedited video tomorrow, perhaps before our morning Bray Lake Test of that extended keel seen below.
![]()

![]()
Saturday 6th May 2017: Above is the unedited video from yesterday. Today's Bray Lake Test was valuable, but took over an hour, because much of the mission was sailing east, against the wind. Below is the GPS Plot held in rb060517.nme . The boat behaved as we might expect. The unedited video will be boring, and is out of sequence, with the end before the launch. The SPOT Trace manages to give 5 minute reports in these conditions of a 10 mph wind. i.e. no need for a vibrator or modification of the SPOT Trace product, other than for dealing with calmer conditions. After analysis of data, another Bray Lake Test is planned for next week. However, Dick has important business in Exeter, and Robin is organising a 70th Birthday Party in Sunninghill :-)
![]()
Tuesday 9th May 2017: Robin now has a Tom-Tom, but these routes with Google Maps - Get Dick to help get Boat into Robin's car ? Saves you petrol, Dick - and my back :-) Boat 11 Keel is now extended 4"/11cm forward ready for Bray Lake Test. Dick at Reading to Robin's about 5 minutes more than to Bray Lake, but saves gas. The critically important Ardulog GPS Logger 5v battery was checked: down to 4.89v. Before rapid charging well above 5v (5.35v), a Futaba male lead was soldered in, which comes outside the box for easier voltage checking and charging. Ready for Dick to inspect Boat 11 and test equipment, confirm I've not forgotten anything, then come for a Bray Lake Test, before a "business meeting" in the Pub :-) Click on pictures to expand.

![]()
Thursday 11th May 2017: Results from Tuesday 9th May Epic Bray Lake Test of over 4 hours, while Dick and Robin enjoyed a Sicilean lunch at La Spiga. Sorry for the delay Dick, and no harm in mentioning the reason here, since few look: Jack's Funeral and My 70th Party - anyone interested in coming ? Email please. The GPS Logger data is in rb090517.nme and I'll add more here later today. Talk later Dick :-)
![]()
Tuesday 16th May 2017: In brief: the main problem seemed to be Lee Helm, with the boat failing to turn into wind and do a "natural tack". We had a strong wind from the South west of about 15mph. The first attempt with Hybrid compass steering failed to make progress upwind. The second attempt, with the compass switched off, went further out, but also failed to make progress. We paid our usual �5 for a rescue. Robin's first thoughts were to test again after extending the keel further forward still. BUT, I'm embarassed to report that, on returning home, I noticed a serious flaw that could explain that boat not turning right: At some time our plastic forward keel extention had got moved off-centre, to the left, by about 15mm ( 0.5 " ) - more than enough to explain our problem. The video reveals a regular turn left, and the GPS-Only rudder bias logic would have done it's best to compensate to the right. It's probable that the keel was like this at Bray Lake. The test equipment worked well, including the FM Radio sound link. The GPS Plot data is in rb160517.nme . Robin's next job will be to use the temporary front keel extention as a template to do the job properly with plywood, Fastglass resin, etc. The video below reminds us to provide a suitable "lifting handle" for the boat. Another Confession: Dick and Robin started with a Sicilean Lunch at La Spiga :-)

![]()
Thursday 15th June 2017: Click on pictures to play or enlarge. We are back from our two week Holiday in Sicily, and yesterday, the front keel extension was done "properly". Boat 11 is now just under 13 kg, after adding the triangle of 4mm birch ply ( Art.88211 from Mantua Models), glued with Fastglass resin, Isopon P40, and West System glass cloth; then painted with International Perfection Snow White. Today, Dick and I gave Snoopy a Bray Lake Test in a strong wind of ~20 mph from the west. In brief: the boat seemed balanced OK, but poor sail trim meant that both mainsail and jib were fluttering, with poor tacking. See the GPS plot of rb150617.nme below.



![]()
Friday 16th June 2017:
Click on pictures to play or enlarge.
It took some time, fighting Nero Video, to produce this 13 minutes from nearly two hours from Camcorder and Mobius cameras.
However, good use was made during restarts of Nero to improve rigging of the sails. Analysis of the Mobius video sound
revealed that the compass started working after about 10 minutes from launch. This is thought to be due to the compass
being more vulnerable to low 5v power, than GPS, Servo or Picaxe computer, but the sun having raised the 5v supply.
No significant change can be seen in the GPS track, with or without compass, which confirms poor tacking was
probably poor sail trim combined with that strong ~20mph wind. We will see what effect our changes have ! :-)
![]()

![]()
Saturday 17th June 2017:
Click on the above-right pictures, taking during 5v voltage tests, to better see things like use of Quick Links
( Fix&Fasten 30445 Quick Links BZP M3 1/8") for things like the kicking strap, to tighten the mainsail.
These also simplify transport with the rig ( mast and sails ) removed. It seems that the compass works when
the main 5v power reaches about 4.8v. When the duplicated 5v power rails are at 5.2v, the resulting voltage
after 0.6v drop across the diodes means the combined power is nearer 4.6v. ( See block diagram near top of the
Design
page. The 6v solar panels normally bring the 5v batteries up to nearer 5.6v fully charged.
I replaced the four Maplin packs by four 2600mAH packs (see 26th April earlier in this blog).
This work was a painful reminder of the many things - not least the quality of my soldering - that need proper inspection and test ! :-)
Sunday 18th June 2017:
Boat11 was left out in the sunshine, and the 6v solar panels raised each side to ~5.55v, and 5.15v final output after the diodes.
Monday 19th June 2017:
5v power 5.67,5.66->5.31v in sun at 1040. Autopilot s/w change to version "Lima" AP28X2L.BAS. Jibe turn logic and TRIMINC 2->5 in Rudder bias.
Wednesday 21st June 2017:
Those at yesterday's Bray Lake Test were Dick, Robin, John, and his dog Bailey.
We were plagued by low water, weed, but mostly the rudder having become loose on it's post,
then Robin not fastening it back in an exactly central position !
This is now fixed with blue Loctite applied.
Computer speech was distorted - probably by the FM Transmitter microphone being too
close the the loudspeaker. It is now repositioned. The FM telescopic aerial was considered
more trouble than it was worth, risking it fouling the main sail boom,
so we have reverted to an aerial wire running up the rear stay.
Boat 11 is ready for it's next test.
It was Eric's funeral today. See
Eric's Page
.
![]()

![]()
Thursday 22nd June 2017:
A strong 15 to 20mph westerly wind showed that we still don't have the balance of the boat correct,
with it failing to turn into wind. i.e. suffering from Lee helm. Maybe we could try letting the jib out ?
A garden rake cleared much of the weed, before our first attempt, with the compass switched on.
We had our first rescue, then switched off the compass, so the hybrid autopilot reverted to old GPS-Only logic.
It clearly did better, just managing to hit waypoint Alpha, but failed progress to Bravo, hitting the far bank.
BUT it seems there is a software bug, shown by the text-to-speech sound from the Mobius camera,
talking about Waypoint "Bravo" being within yards, near that far bank. Solution? Put in one of the old
Autopilots, and see what this does in the same Boat 11. I easily swapped with the Picaxe 08M2 Autopilot
from Eric's Boat12. It starts up saying "18 October"*.
Friday 23rd June 2017: *2016: AUTOP10.BAS identical to AUTOP9TTS used for 2016 attempt, but rudder bias logic corrected.
The video from yesterday is below.
![]()

![]()
Friday 23rd June 2017 (Evening):
I was fortunate in getting almost identical conditions as our earlier attempts this week: strong 15 to 20 mph wind
from the West to South West. It seems that this is above the limit for our "natural" tacking, used for years,
and we will have to live with it. When adjusting the sails, earlier in the day, I found that the mainsail boom
was nearer 40 degrees from centre, so this was pulled in to nearer 30. The jib boom was let out to nearer 40.
How will the boat performs in lighter and kinder wind conditions ? :-)
Saturday 24th June 2017:
The 10 minute video is now below. Back to sails at 30 & 30 degrees, and the latest Hybrid Autopilot - with a software check ?
![]()

![]()
... a tea tray system now in a plastic box was given a walk around Bray Lake to look for software bugs ... tests in boat or car are easier than on foot ! :-)
Sunday 25th June 2017:
Two software bugs found and fixed: distance "frig" of 21Oct16 and Jibe Left was to right. Directions seemed OK. Now version "Mike" AP28X2M.BAS.
Monday 26th June 2017:
"Mike" updated to remove risk of 16 bit unsigned (65k) overflow on range. Now speaks range in km. e.g. "Alpha 11km at 349 degrees" from home.
Tuesday 27th June 2017:
Another 16 bit overflow risk found and fixed, related to applying COS(Lat) on Longitude difference. Road test to Addlestone seemed OK:
"20km at 315 degrees" ( 19.97 @ 316 ), with no glitches, but the Autoplot froze and needed a restart on way back !
AND both hybrid autopilots have significant compass errors, of 20 to 30 degrees, when tested at the end of my drive.
I found an old Picaxe 08M2 program, COMPASSC.BAS, which used TTS to ask you to rotate 360 degrees twice, in 20 secs, so it could calibrate
the compass. I confess to wasting time with a 28X2 version, COMPASSK.BAS but stopped work. What's the point when these old CMPS10
are out of stock and the CMPS11 is unlikely to be fully compatible ?
Lack of adequate time and effort means
this year's boat may have to stick with GPS-only steering.
The next Bray Lake Test will be with "no compass".
Wednesday 28th June 2017:
After more tests of the two Hybrid Autopilots, a third, without compass, is now in Boat 11 for tests with software version "Mike".
Click below.
![]()

![]()
Thursday 29th June 2017: Robin and Dick took Boat 11 and Eric's Boat 12 to Bray Lake - both with version "Mike" of the Picaxe 28X2 Autopilot,
without a compass. Wind was from the West at between 6 and 10 mph: say 8mph - and neither boat did well. Boat 12 needed a rescue from the island.
When Robin got home he tried a "blower test" on June's massive swimming pool.
There may have been a little "weather helm", turning into wind - but that was not reflected in Boat 11's track past the island.
Click on GPS Plot below.
Friday 30th June 2017:
The video is now below with some selected Mobius clips near the end. Next tests: Software in Boat 11 and 12 WAS updated to AP28X2N.BAS, from version "Mike" to "Noddy" (avoid confusion
of "November" ), reverting back to earlier smaller rudder bias increment of 2 from 5. Caused "zig-zag" course ? Still has Jibe turn logic.
Boat 12 rudder exactly centred and blue loctite applied. Unedited Mobius video in 290617c.mp4 moved via USB to lounge PC for analysis.
It reveals software bugs. e.g. says close to "Bravo" at 1357 GMT ( Bravo at 270: same Latitude ). Also errors in steering calculation ?
BUT NOW both Boats 11 and 12 autopilots have now been loaded with AP28X2K.BAS - version "Kilo" - after seeing the good GPS Plot on 3rd May above.
After Bray Lake Tests, we can update version "Noddy" to incorporate both corrections and those recent "overflow" bug fixes.
I see our third TTS unit was in Boat 12, so this now also speaks. The TTS and Mobius sound is proving it's worth :-)
![]()


![]() Friday 30th June 2017:
BRAY LAKE TESTS:
As it says near the top of the
Snoopy
page,
Snoopy's Boat is
HERE.
More here in due course, but - in brief - Dick & Robin took Boats 11 and 12 for Bray Lake Tests. Boat 12 did well but Boat 11
was still there when Robin eventually got home. If someone touches the boat, or wind increases, it should trigger SPOT Trace updates.
The autopilots and software versions were identical - but were they ? Suppose the Globalsat BR355-S2 GPS in Boat 11 had lost
it's firmware settings, and reverted to Static Navigation being on ? Yet another thing to worry about: the neat solution is to know
the sequence of binary bytes for the Autoplot to set up the GPS. This is normally done by the SiRF utility GPSINFO.
Anyone care to find out ?
Static tests of autopilots should easily show if this is a problem.
Meanwhile, when we get Boat 11 back, we could swap autopilots to see if that makes a difference.
It will also be good to access the recorded GPS logger data and Mobius video with sound. Our transistor radio stopped
receiving speech, and the reason is not yet known. Boat 11 was still steering, or it would have drifted downwind and to the shore.
But, of course, it might not have been steering correctly !
Friday 30th June 2017:
BRAY LAKE TESTS:
As it says near the top of the
Snoopy
page,
Snoopy's Boat is
HERE.
More here in due course, but - in brief - Dick & Robin took Boats 11 and 12 for Bray Lake Tests. Boat 12 did well but Boat 11
was still there when Robin eventually got home. If someone touches the boat, or wind increases, it should trigger SPOT Trace updates.
The autopilots and software versions were identical - but were they ? Suppose the Globalsat BR355-S2 GPS in Boat 11 had lost
it's firmware settings, and reverted to Static Navigation being on ? Yet another thing to worry about: the neat solution is to know
the sequence of binary bytes for the Autoplot to set up the GPS. This is normally done by the SiRF utility GPSINFO.
Anyone care to find out ?
Static tests of autopilots should easily show if this is a problem.
Meanwhile, when we get Boat 11 back, we could swap autopilots to see if that makes a difference.
It will also be good to access the recorded GPS logger data and Mobius video with sound. Our transistor radio stopped
receiving speech, and the reason is not yet known. Boat 11 was still steering, or it would have drifted downwind and to the shore.
But, of course, it might not have been steering correctly !
Saturday 1st July 2017: Click on pictures below for more detail or to play the video : Snoopy's Boat 11 did eventually get back to Base ! Robin saw on SPOT that he was back, and went over to Bray Lake to collect the boat and that valuable data in Mobius camera and GPS Logger - in rb300617.nme - those unexpained SPOT positions could have been coincidence: Snoopy DID spend a lot of time patroling the lake ! :-) Tests before Snoopy was loaded into the car looked good. Best guess from looking at the videos is that - as Dick suggested yesterday - we should try Boat 11 with a bigger rudder.
![]()

![]()
 Sunday 2nd July 2017: The video above is now 28 minutes without the extra blank material at the end. Thanks Dick ! :-)
Sunday 2nd July 2017: The video above is now 28 minutes without the extra blank material at the end. Thanks Dick ! :-)
Work on a bigger rudder reveals that the existing rudder did not turn smoothly. For years, Boat 11 has used two matching brass tubes
that are a sliding fit. The outer one is fixed in the boat, coming up into the box. The inner one is fixed to the rudder,
and is strengthened by steel rod resined inside ( this will become non-magnetic brass or carbon fibre - C/F ). Cleaning the grease,
contaminated by years of grime, with white spirit and cotton wool buds, has yet to give the required free movement.
Alteratives include a smaller diameter C/F rod, fixed to the new rudder. This is unlikely to be the source of
our problems, but needs to be fixed, since it would cause larger servo power consumption and greater wear and tear,
leading to less reliability.
Monday 3rd July 2017: Boat 11 is ready to test with a bigger rudder. Click on pictures to enlarge. Last night I replaced
the brass tube in the boat by C/F tube with a bigger diameter hole. Brass tube around C/F rod is used for the rudder post on the
larger, prototype rudder. The blue loctite had not dried overnight: goes off ? Resin next time ? Don't let me forget this is
a prototype and I need to do it properly.
There was also a comment on the
Youtube video
that I have responded to.
I hope Dominik contacts me direct ;-)
Tuesday 4th July 2017:
The video below tells our adventures of yesterday better than words or GPS Plot in
rb030717.nme
. Click on pictures to enlarge and read. New rudder soon :-)
![]()


![]()
 Wednesday 5th July 2017:
Back to original smaller rudder and an earlier Autopilot ? It seems the 7 sec control cycle
is not holding rudder long enough. Good and Bad news after speaking with Colin of Miocrotransat:
Snoopy's Boat 11 is now registered on the
Microtransat Team-Joker page; We need to get
the
SPOT Trace Tracking
available to Microtransat.
The old SPOT Messengers supported email reporting - but does SPOT Trace ?
Also, I see alerts saying our SPOT Trace needs a firmware update, using the SPOT Device Updater.
Update:
The original rudder is back in, secured by spots of Fastglass resin instead of Loctite. However, it was seen that the
bigger rudder had snapped off near the bottom of the boat, and the lake-side servo linkage change was OK.
This was due to my sloppy work on that prototype rudder - the internal carbon fibre rod core did not entend up
inside the rudder post brass tube, extending 20cm/8" into the boat.
It seems software version "Kilo" was supposed to have fixed the bug causing that rudder "flip" problem: see Blog entry
above for Wednesday 3rd April.
Boat 11 now has the old Picaxe 08M2 Autoplot with the "18th October (2016)" software.
Working on our latest version "Oscar", it seems we have servo control problems with Picaxe 28X2 Autopilots.
It may be related to the need to switch Picaxe frequency within the control loop, to work around
restrictions in the Picaxe 28X2 firmware. i.e. handling GPS serial input and rudder servo output.
We have experimented with 28X2 Autopilots for years - but now we are into more serious testing !
Wednesday 5th July 2017:
Back to original smaller rudder and an earlier Autopilot ? It seems the 7 sec control cycle
is not holding rudder long enough. Good and Bad news after speaking with Colin of Miocrotransat:
Snoopy's Boat 11 is now registered on the
Microtransat Team-Joker page; We need to get
the
SPOT Trace Tracking
available to Microtransat.
The old SPOT Messengers supported email reporting - but does SPOT Trace ?
Also, I see alerts saying our SPOT Trace needs a firmware update, using the SPOT Device Updater.
Update:
The original rudder is back in, secured by spots of Fastglass resin instead of Loctite. However, it was seen that the
bigger rudder had snapped off near the bottom of the boat, and the lake-side servo linkage change was OK.
This was due to my sloppy work on that prototype rudder - the internal carbon fibre rod core did not entend up
inside the rudder post brass tube, extending 20cm/8" into the boat.
It seems software version "Kilo" was supposed to have fixed the bug causing that rudder "flip" problem: see Blog entry
above for Wednesday 3rd April.
Boat 11 now has the old Picaxe 08M2 Autoplot with the "18th October (2016)" software.
Working on our latest version "Oscar", it seems we have servo control problems with Picaxe 28X2 Autopilots.
It may be related to the need to switch Picaxe frequency within the control loop, to work around
restrictions in the Picaxe 28X2 firmware. i.e. handling GPS serial input and rudder servo output.
We have experimented with 28X2 Autopilots for years - but now we are into more serious testing !
SPOT Trace emails to Microtransat: Peter reminded us that this was working some time ago. However, it seems SPOT have removed the facility
from their SPOT Management page. I'm now testing a (new?) "Movement Alert" facility, which is now enabled, and should generate
emails to spott@gpss.co.uk that I can redirect elsewhere. Now set to 30 minutes (if has moved sufficient distance).
The only alternative was 12 hours. At first I received no email to spott@gpss.co.uk despite the tracking showing
20 metre movements within my garden, or a 5 minute trip of 400 metres to the village. I also get them after only 40m.
I've also enabled the
emails to the Microtransat tracking email address, and Colin confirms he is getting them. The SPOT Trace is now back in Boat 11.
After looking at the good Bray Lake Test plots on 21st April above, I've swapped the old Picaxe 08M2 Autopilot
for the 28X2 with version "Hotel" ( AP28X2H.BAS ) in Boat 11. It is also in Eric's Boat 12: ready for another race :-)
 Thursday 6th July 207:
Old "2016 Attempt Analysis" material moved from top into a new page. It looks like more Bray Lake Tests this afternoon ...
Thursday 6th July 207:
Old "2016 Attempt Analysis" material moved from top into a new page. It looks like more Bray Lake Tests this afternoon ...
Yes, Roy joined Dick and Robin, in blistering heat, to watch Eric's Boat 12 humiliate our Boat 11 yet again. The GPS Plot in
rb060717.nme
below shows Boat 11 eventually crawled round in 1.5 hours. Meanwhile, Eric's Boat 12 did the complete circuit three times.
We also checked the SPOT Trace reporting: we only got two position reports emailed, at 1602 BST and 1713 BST - both at Bray Lake.
Click on pictures to enlarge. Click on Eric to visit
Eric's Page
.
Friday 7th July 2017:
It is now clear that yesterdays session was of great value: we shall give our autopilot software
tests on Eric's Boat 12 to reduce the risk of our being confused by other things. e.g. low speed resulting in inacurate GPS heading;
sailing balance of Boat 11, still being proven. There was also some fun ;-)
Saturday 8th July 2017:
Boat11's sails and rigging will be tidied up* to be more like Eric's Boat12. The top of the mainsail was hitting the rear stay (string) !
Monday 10th July 2017:
* Done: both booms swing freely. Jib tied to Mast, as for Boat12 (and others); lifting handle is now done better; could tie jib; click below.
Tuesday 11th July 2017:
Work on Autopilot software AP28X2N.BAS "Noddy" for a GPS-Only version, with bug fixes made after "Hotel".
![]()

![]()
Wednesday 12th July 2017:
After a good road test last night, version "Oscar" AP28X2O.BAS was put into Boats 11 & 12 for Bray Lake Test. Includes more SERTXD - see
BlogX.
Dick and Robin had good Bray Lake Tests with Boats 11 and 12.
The GPS Plot of Boat 11 is in
rb120717.nme.
The (almost) useless GPS Plot for Boat12 is in
xa120717.nme.
More results and conclusions to follow here in due course, including the video...
This PC busy pre-processing for hours, and editing yet to be started !
However - here is some food for thought: take a look through my blogs over the years,
and those good GPS plots with different keels - all with the centre of keel pressure further back.
i.e. to encourage lee helm rather than weather helm, to make our autopilot work.
Maybe I was much too quick in adding that front keel extention, and it needs to be sawn off !
Thursday 13th July 2017:The 22 minute video is now below.
Click on pictures to see more or play.
Maybe a bigger rudder would be easier to try next :-)
SPOT Trace "Movement Alerts" ( see 5th July above) are unsuitable: only one emailed position at 1141 BST, as Snoopy left home, and one at 1440, as we left Bray Lake !
![]()

![]()
Friday 14th July 2017:
Boat11 now has a larger rudder: 3/16" C/F rod; Fastglass resin & Ply; easy to cut smaller if needed after tests ! :-)
Saturday 15th July 2017:
Wasted a few hours on AP28X2P.BAS "PaPa" trying to remove bug heard of spoken range (too small) from Alpha to Beta. Testing in boxed test system.
Sunday 16th July 2017:
Not such a waste of time today, explained in
BlogX
. The software now speaks range accurate to 3 metres, helped by a new "Playing Field" test.
Boats 11 and 12 are now loaded with latest version "PaPa", ready for Bray Lake Tests.
Monday 17th July 2017:
Boat 11 was switched on at 1015 and put in our front garden - the sunniest spot - for 24/7 test, particularly of the 5v power system.
e.g. LHS and RHS duplicated solar power, and their combined 5v voltage before sun, was 5.83v,5.81v->5.41v @ 1015. After 45 minutes in sun this was 5.97v,6.01v->5.37v.
CCTV watches the boat, including rudder movements, to see if and when it fails overnight.
Friday 21st July 2017
After radio tests reported in
BlogX
, seen in this video, the Autopilot software AP28X2P.BAS was updated to "Papa 21st July 2017 5:40pm", with a minor change:
preceed spoken time by "GPS Time", so the time itself is heard, after PMR transceiver switching. This version is now in Boat11,
Boat12, and the Autopilot Test box.
Sunday 23rd July 2017:
Boat11 Autopilot still running after 6 days on "Garden 24/7". SPOT Trace gave a movement alert OK. Click on pictures to enlarge or play.
![]()

![]()

 Monday 24th July 2017:
Boat11 is still running.
Colin of Microtransat now has a work-around working for the limitation in SPOT Trace position reporting.
The SPOT Trace was temporarily moved from the boat into the car for a road test. Click on the SPOT map to see details.
Colin's "SPOT web scraper report" emails came in reliably, for the 5 minute map updates.
One SPOT "Movement Report" came in, saying that the asset was in Bagshot - not useful.
Monday 24th July 2017:
Boat11 is still running.
Colin of Microtransat now has a work-around working for the limitation in SPOT Trace position reporting.
The SPOT Trace was temporarily moved from the boat into the car for a road test. Click on the SPOT map to see details.
Colin's "SPOT web scraper report" emails came in reliably, for the 5 minute map updates.
One SPOT "Movement Report" came in, saying that the asset was in Bagshot - not useful.
 We used the opportunity to top up the SIM card in the Pocket Pal discussed on the
AVL
page. We may clip it to the mast on the next Bray Lake Test to check GSM based tracking and two way speech
via a mobile 'phone.
We used the opportunity to top up the SIM card in the Pocket Pal discussed on the
AVL
page. We may clip it to the mast on the next Bray Lake Test to check GSM based tracking and two way speech
via a mobile 'phone.
Tuesday 25th July 2017: The second unbranded servo failed after 6 days: that's two. The third was put on test. The Carson one is still running. A fourth EMIC 2 Text-To-Speech (TTS) unit arrived ( �60 from UK Hobbytronics Ltd - cheaper and faster than from USA ) and this was quickly soldered onto a loudspeaker and Futaba lead. The TTS is now with the Personal Mobile Radio (PMR), protected by plastic bags. The garden lamp in the picture shines on a CD, clamped to the rudder, so movements show up at night on CCTV. Boat11 remains on "Garden 24/7 Test" - but without the TTS, so as not to disturb the neighbours :-)
 Wednesday 26th July 2017:
It did not take long to resurrect the old GPSS-based GPS Simulator. I soldered two wires ( green and black ) from
a BR355 PS2 lead onto a 9 pin socket to plug into my old ADVENT (32 bit ) Windows 7 PC. There are more videos and explanation
of the GPS Simulator on Snoopy's
Design page under "Software".
I can provide a link to a ZIP file, holding GPSS.EXE and the maps along Snoopy's Trans-Atlantic route,
to those helping. The com port must be edited into GPSS.CFG and GPSSSIMU.CFG. e.g. COM1 if the D type COM1,
or an alternative such as COM4 if using a USB to D type convertor, for PC without the COM1 serial port.
It now also works on our Lenovo lounge Win7(32bit) PC, via a USB converter.
Note that Microsoft 64 bit OS are NOT able to run old 16 bit applications like GPSS.EXE, but I have run
it on a Linx under Windows 10. GPSS can be used to create simulation scripts for anywhere in the World.
Wednesday 26th July 2017:
It did not take long to resurrect the old GPSS-based GPS Simulator. I soldered two wires ( green and black ) from
a BR355 PS2 lead onto a 9 pin socket to plug into my old ADVENT (32 bit ) Windows 7 PC. There are more videos and explanation
of the GPS Simulator on Snoopy's
Design page under "Software".
I can provide a link to a ZIP file, holding GPSS.EXE and the maps along Snoopy's Trans-Atlantic route,
to those helping. The com port must be edited into GPSS.CFG and GPSSSIMU.CFG. e.g. COM1 if the D type COM1,
or an alternative such as COM4 if using a USB to D type convertor, for PC without the COM1 serial port.
It now also works on our Lenovo lounge Win7(32bit) PC, via a USB converter.
Note that Microsoft 64 bit OS are NOT able to run old 16 bit applications like GPSS.EXE, but I have run
it on a Linx under Windows 10. GPSS can be used to create simulation scripts for anywhere in the World.
Friday 28th July 2017:
Snoopy's Test Autopilot now has an "Internal/External GPS" switch and a socket to receive the plug
from the Lounge PC connected to our TV. Good eh ? :-)

 Saturday 29th July 2017:
Boat11 switched off and brought indoors after 12 days of Garden 24/7 Test. 5v power good: 5.69,5.78->5.36v.
We mustn't wear it out :-)
Saturday 29th July 2017:
Boat11 switched off and brought indoors after 12 days of Garden 24/7 Test. 5v power good: 5.69,5.78->5.36v.
We mustn't wear it out :-)
Sunday 30th July 2017:
We now have 3G protection against water ingress, into the box, up through the gap between the carbon fibre (C/F)
rudder post, and the C/F tube that is a loose fit. The main protection is GREASE: lots of it.
The next G is GRAVITY: the top of the tube is a good 5"/13cm above water level - BUT when the boat heels over .... !
Our third G is GLOVE. I snipped a finger off one of the wife's rubber kitchen gloves, filled it with more grease,
then pushed it over the C/F upright tube, and pushed a length of transparent plastic tube over rubber and C/F tube.
A ballpoint pen casing did the job nicely. Click on the picture to enlarge. I'd hoped that the rudder post would be surrounded by rubber, but this
broke through when I replaced the servo lever arm. However, there is a lot of Grease, so we have 3G:
Gravity, Glove, and Grease :-)
Monday 31st July 2017: Click on the map to enlarge and see the modification to the Autopilot Software version "Quebec"
(AP28X2Q.BAS) which attempts to reduce cross track error. It has been implemented for the five Bray Lake Test waypoints,
and for those along the English Channel, from "Channel", through "Weymouth", "Prawle", "Lizard", to the Microtransat Start Line.
We will test it in Eric's Boat 12, to see how well software version "Quebec" works on Bray Lake. Boat 11 is still being "balanced"
using version "PaPa".
Wednesday 2nd August 2017: A water bomb was used to add another layer of rubber of 3G protection. See blue locktite. Servo linkage is on 3rd hole from end of rudder arm.
![]()
 Thursday 3rd August 2017:
Click on pictures to expand and see details.
We now have a spare, and better, GPS Logger, based on the same type of Ardulog unit, with it's SD card, but with a Globalsat BR355 GPS.
This is discussed on 23rd July 2017 in
RBBLOGX.
As I had hoped, our problem of BR355 signal inversion, needed by the Ardulog, was easily achieved by a transistor and couple of 10 K resistors.
The "kerb-crawling" road test showed remarkable accuracy, in the ballpark of just 2 metres.
The NMEA GPS data, filtered with ONLYRMC.EXE to only RMC sentences, is in
030817.nme
for those who want to know.
I guess I better tidy this "bird's nest" up, before stuffing it back
into it's waterproof box. Selotape should do the job ! :-)
Thursday 3rd August 2017:
Click on pictures to expand and see details.
We now have a spare, and better, GPS Logger, based on the same type of Ardulog unit, with it's SD card, but with a Globalsat BR355 GPS.
This is discussed on 23rd July 2017 in
RBBLOGX.
As I had hoped, our problem of BR355 signal inversion, needed by the Ardulog, was easily achieved by a transistor and couple of 10 K resistors.
The "kerb-crawling" road test showed remarkable accuracy, in the ballpark of just 2 metres.
The NMEA GPS data, filtered with ONLYRMC.EXE to only RMC sentences, is in
030817.nme
for those who want to know.
I guess I better tidy this "bird's nest" up, before stuffing it back
into it's waterproof box. Selotape should do the job ! :-)
Thursday 10th August 2017:
A useful session at Bray Lake: Boat 11 with a bigger rudder, and Boat 12 with new software "Quebec". Click on pictures to enlarge.
The video from camcorder and the Mobius camera - this time on on Boat 12 - may reveal why Boat 12 did two circuits.
e.g. wind dropped or shifted, and he hit Alpha by accident, trying to return to Delta ? At first I thought it was a bug
in that new "Quebec" software, but the friendly paddle-boarder told me he had removed weed, and after that, Boat 12 did well.
The recorded GPS logger data for Boat 11 is in
10081711.nme
, and that for Boat 12 is in
10081712.nme
.
The Mobius video WAS very revealing: our problem was due to the 5v battery being low on power. We can clearly hear several
restarts of the software - which selects target "Alpha". However, the bright sun meant that the solar panel did it's good work,
and the boat managed to complete the mission. After seeing the video I checked the battery: just 5.01v - well below the more
typical 5.6v. I should also mention here that Colin of Microtransat's SPOT tracking "scraper" emails came through as they should,
as soon as the boat started to move in my garden, then to and from Bray Lake. We also had enough movement, despite light wind,
to get several updates on the public
Snoopy SPOT map
. The main source of power problems on Boat 12 turned out to be an unreliable on/off switch - now replaced.
Two videos are expected to be added here tomorrow morning: 1) about 26 minutes edited video record. 2) All 82 minutes of Mobius onboard
video - for those who want to look at it :-)
Friday 11th August 2017:
Check out the 26 minute video below. For the 82 minute Mobius video as an MP4 file, try
www.gpss.co.uk/video/mv100817.mp4
in my web space. I've also put the edited 26 minute video in
www.gpss.co.uk/video/rb100817.mp4
for those who prefer MP4 to Youtube, not able to cope with the 82 minute video. I use VLC Media Player.
.
![]()
![]()
 Thursday 17th August 2017:
Click on pictures to enlarge. In brief: Yesterday, Peter, Dick and Robin had a valuable afternoon at Bray Lake,
after a bigger meeting before lunch with Roy and Stuart. Boat 11 sailed OK, tacking into the wind, and making slow progress upwind
towards waypoint "Alpha". Wind was a good 14mph from the Sou-Sou-West.
The GPS plot below is in
16081711.nme
.
But then it's rudder linkage "flipped" - a problem we've had before.
One solution discussed was to reverse the linkage, so servo arm and rudder post arm, are on the same side.
Rather than change software, I thought we might try a
Servo Reverser
. I've ordered four, at �25, fast delivery,
from KC Model Accesories. After confirming one does not consume significant extra current, we can test the idea, and also
put some into our 24/7 test rig.
Boat 11 also carried Peter's
transmitter, at the top of it's mast, so he could monitor what was being spoken by the Picaxe computer, on his Laptop PC screen.
Boat 12 carried Roy's Australian MicroMite computer, having it's first test on water. It carried the Mobius camera and it
had a different software problem, which should be easy to fix: the time the rudder is held over, based on the speed of the boat.
i.e. needs to be less time if faster, to avoid "over-steering" - which we saw.
The GPS plot for Boat 12 below is in
16081712.nme
.
I've played all the 1.75 hours of valuable Mobius video here: It shows the over-steering well, but also it doing the right
things, like selection of "Alpha" when near "Base", calculation of directions, etc. After adding that speed dependent logic,
I will add spoken time, like the Picaxe software. Mobius Video time-stamp is BST and 1 minute ahead.
More here later, including the full video record.
The short, 10 minute video is now below. You will see things like my Australian car SatNav
guiding me to Bray Lake, and our antics in handling both boats, Peter's equipment, and incoming 'phone calls.
The full video will include things like the rescue, range testing of Peter's equipment, and more of MicroMite boat12's
Mobius video. It shows things like over-steering, the need for spoken time ( like the Picaxe autopilots ),
and the unexplained halting of speech before the end of the mission. It may also include clips
from the morning meeting
of us with Roy and Stuart. Roy is to the right of Aleksey's Sailing Saucer and the flatulent gnome :-)
Thursday 17th August 2017:
Click on pictures to enlarge. In brief: Yesterday, Peter, Dick and Robin had a valuable afternoon at Bray Lake,
after a bigger meeting before lunch with Roy and Stuart. Boat 11 sailed OK, tacking into the wind, and making slow progress upwind
towards waypoint "Alpha". Wind was a good 14mph from the Sou-Sou-West.
The GPS plot below is in
16081711.nme
.
But then it's rudder linkage "flipped" - a problem we've had before.
One solution discussed was to reverse the linkage, so servo arm and rudder post arm, are on the same side.
Rather than change software, I thought we might try a
Servo Reverser
. I've ordered four, at �25, fast delivery,
from KC Model Accesories. After confirming one does not consume significant extra current, we can test the idea, and also
put some into our 24/7 test rig.
Boat 11 also carried Peter's
transmitter, at the top of it's mast, so he could monitor what was being spoken by the Picaxe computer, on his Laptop PC screen.
Boat 12 carried Roy's Australian MicroMite computer, having it's first test on water. It carried the Mobius camera and it
had a different software problem, which should be easy to fix: the time the rudder is held over, based on the speed of the boat.
i.e. needs to be less time if faster, to avoid "over-steering" - which we saw.
The GPS plot for Boat 12 below is in
16081712.nme
.
I've played all the 1.75 hours of valuable Mobius video here: It shows the over-steering well, but also it doing the right
things, like selection of "Alpha" when near "Base", calculation of directions, etc. After adding that speed dependent logic,
I will add spoken time, like the Picaxe software. Mobius Video time-stamp is BST and 1 minute ahead.
More here later, including the full video record.
The short, 10 minute video is now below. You will see things like my Australian car SatNav
guiding me to Bray Lake, and our antics in handling both boats, Peter's equipment, and incoming 'phone calls.
The full video will include things like the rescue, range testing of Peter's equipment, and more of MicroMite boat12's
Mobius video. It shows things like over-steering, the need for spoken time ( like the Picaxe autopilots ),
and the unexplained halting of speech before the end of the mission. It may also include clips
from the morning meeting
of us with Roy and Stuart. Roy is to the right of Aleksey's Sailing Saucer and the flatulent gnome :-)
![]()











![]()
Friday 18th August 2017: That Tea Tray Test video above shows the first test of MicroMite software changes resulting from last Wednesday's sail at Bray Lake. i.e. The computer speaking time. e.g. "GPS Time is 16:20 and 35 seconds". Why say "GPS Time" ? It's primarily to trigger transmission when using CB radio in VOX mode ( seen in old Snoopy videos ). The other important change was to stop over-steering, seen in the extract from Wednesday's video. i.e. the rudder is held for a time dependent of boat's speed: 1.5 seconds if fast, through to 3.5 secs if slow. This has been used in Snoopy's GPS-Only autopilots for years, and is described under "software" on the Design page. Some nice clips from Wednesday appear at the end. More important work today involved checking Boat11's Picaxe Autopilot software "Quebec" ( AP28X2Q.BAS ) to make sure it limits rudder throw to plus or minus 45 degrees ( that "rudder flip" problem discussed earlier ). It looks OK, but anything could be going on within the lower level firmware, so mechanical solutions should be explored - perhaps aided by those "servo reversers" above. This morning I also approved the page appearing in our local church magazine being printed today. See Jack .

 Saturday 19th August 2017:
Mr Postman delivered the four FM Bugs from China and the four servo reversers ordered last Thursday from Barry at KC Model Accesories.
They look perfect and I did some tests: they reverse the servo throw, with same 45 degree angles, and simply plug in between
the servo and computer;
draw only 6mA when connected direct to 5.79v battery; Our total BR355-S4/Picaxe-28X2/AS17 Servo drawing 66mA rises to only 73mA,
plus the brief ~200mA pulses when the rudder servo moves, typically every 7 seconds. So average GPS-Only autopilot current
draw is still in the same ballpark: say 70mA to 80mA. i.e. within the capacity of our Boat11 5v solar power system.
One of the reversers was put in our 24/7 servo test rig, with the Carson servo.
See 27th July in
BlogX
for more about servo testing.
Click on the pictures on the right to expand. At first I though it would be a major layout change to end up with
the servo lever and rudder post lever on the same side - but I JUST managed it.
A mechanical stop is also easy: just a screw into the wood; or perhaps something fixed around the servo.
There is now a "reverser" between rudder servo and Picaxe 28X2 computer.
Wednesday's sail broke that rubber water baloon ! :-)
Saturday 19th August 2017:
Mr Postman delivered the four FM Bugs from China and the four servo reversers ordered last Thursday from Barry at KC Model Accesories.
They look perfect and I did some tests: they reverse the servo throw, with same 45 degree angles, and simply plug in between
the servo and computer;
draw only 6mA when connected direct to 5.79v battery; Our total BR355-S4/Picaxe-28X2/AS17 Servo drawing 66mA rises to only 73mA,
plus the brief ~200mA pulses when the rudder servo moves, typically every 7 seconds. So average GPS-Only autopilot current
draw is still in the same ballpark: say 70mA to 80mA. i.e. within the capacity of our Boat11 5v solar power system.
One of the reversers was put in our 24/7 servo test rig, with the Carson servo.
See 27th July in
BlogX
for more about servo testing.
Click on the pictures on the right to expand. At first I though it would be a major layout change to end up with
the servo lever and rudder post lever on the same side - but I JUST managed it.
A mechanical stop is also easy: just a screw into the wood; or perhaps something fixed around the servo.
There is now a "reverser" between rudder servo and Picaxe 28X2 computer.
Wednesday's sail broke that rubber water baloon ! :-)
Sunday 20th August 2017:
"A proper job" was done on the contents of Snoopy's Box as seen in right-most photo above. Click on it. More explanation later :-)
- but now June and I are off to
Titsey Place Gardens open for the NGS Charity.
Probably will cost �10* for admission. I know how to treat a woman ;-)
![]()
 Thursday 24th August 2017:
*It was �9. See the Titsey video on our
Family
page. Since then, there was progress I would categorize as "experimental", and is documented on our
BlogX
page. e.g. "Work" on the MicrMite computer, Eric's Boat12, and products like the s7V8 voltage regulator.
Thursday 24th August 2017:
*It was �9. See the Titsey video on our
Family
page. Since then, there was progress I would categorize as "experimental", and is documented on our
BlogX
page. e.g. "Work" on the MicrMite computer, Eric's Boat12, and products like the s7V8 voltage regulator.
Today I managed to replace the broken rubber seal to the rudder post on Boat11 for this year's MicroTransat Attempt. I found the little rubber balloons sold as "water bombs" were too fragile and broke. However, the necks made perfectly sized "rubber bands" to hold the rubber seal in place. What did I use ? Another finger from one of June's rubber kitchen gloves at the side of the kitchen sink. I put it back, and I doubt she will notice.
How did I do this work ? I unscrewed the servo arm, so I could pull the Z-Bend wire from out of the rudder post arm. After putting the rubber finger in place, I pushed the Z-Bend back and screwed the servo arm back on. Click on the picture to see details.
Friday 25th August 2017: See BlogX for experimental work, such as the MicroMite Autopilot in Boat12. Boat11 is ready for Bray Lake Test, then maybe it's first taste of 24/7 testing in Snoopy Corner, to see how reliable it is !

 Thursday 31st August 2017:
( Much that was here is now moved into
BlogX
because it was mostly "Experimental" work for next year's boat )
In brief: Peter, Roy, Dick, and Robin put together kit for Boat11 and Boat12, before pub grub then several hours at Bray Lake,
in extremely light wind conditions: ending in dead calm. Boat12 with the MicroMite Autopilot did two circuits quicker than Boat11,
which needed help for the last few yards, by Paul, the friendly paddleboarder. The GPS logger plot for Boat11 is in
31081711.nme
.
Version Quebec does seem to keep the boat on track, between waypoints, but we obviously need to test in stronger winds.
Thursday 31st August 2017:
( Much that was here is now moved into
BlogX
because it was mostly "Experimental" work for next year's boat )
In brief: Peter, Roy, Dick, and Robin put together kit for Boat11 and Boat12, before pub grub then several hours at Bray Lake,
in extremely light wind conditions: ending in dead calm. Boat12 with the MicroMite Autopilot did two circuits quicker than Boat11,
which needed help for the last few yards, by Paul, the friendly paddleboarder. The GPS logger plot for Boat11 is in
31081711.nme
.
Version Quebec does seem to keep the boat on track, between waypoints, but we obviously need to test in stronger winds.
Saturday 2nd September 2017:
See
BlogX
for much more, such as the GPS Plots and 1.7 hour Mobius video from the MicroMite steered Boat12.
![]()
 Sunday 3rd September 2017:
This may belong in
BlogX
, with other "experimental" work, but it has enormous significance for our GPS-Only autopilots, that use the GPS Heading.
In brief: yesterday, using my old GPS Software, GPSS, running on a Linx 10, to monitor the same GPS data being fed into
a MicroMite Autopilot, I saw a massive delay in the direction of movement. All GPS, when properly set up, should update
both GPS Position and velocity accurately, every second. Velocity is speed, and the "GPS Heading" or "Course Over Ground",
critical to our GPS-Only or Hybrid Autopilots. It is probable that this problem can be fixed by changing the Globalsat BR355-S4
settings. If not, the GPS will need to be changed. This is the first time Robin has seen this problem in decades
of working with GPS. Priority tasks are to see if our Picaxe 28X2 Autopilot in Boat 11, being prepared for the 2017
Atlantic Attempt, has this problem*. Also, our spare GPS-Only autopilots. It is also of critical importance to longer term
experimental work, such as the new MicroMite based Autopilot. Robin must have wasted several hours looking for
software bugs, when the poor steering was down to the poor data coming from the GPS ! * Good News update at 1430: a tea tray test
of Boat11's Autopilot showed rapid rudder turning, in the correct direction, within the 7 second control cycle.
This is the same type of Globalsat BR355-S4 GPS, with "G-Star IV" written on it's black plastic case.
More Good News at 1500: Boat12's MicroMite Autopilot, with a BR355-S4, loaded with same latest version "Alpha" of software,
worked OK, with rapid steering changes in response to change of movement direction. So perhaps it's just this one BR355
that needs to be fixed.
Footnote on Wednesday 6th September 2017:
Thanks to Jesse at Globalsat in USA, we are trying a firmware patch that I have saved in
rbpatch2.zip
. Running the patchS4_S-0PC-12-1307121.exe applied the patch, but this is still
our old Version2:F-GPS-4R-1201127. This seems to be the same EXE as in our old patch.
This firmware should have static navigation & smooth heading filtering disabled.
We still seem to have smooth heading filtering enabled.
Sunday 3rd September 2017:
This may belong in
BlogX
, with other "experimental" work, but it has enormous significance for our GPS-Only autopilots, that use the GPS Heading.
In brief: yesterday, using my old GPS Software, GPSS, running on a Linx 10, to monitor the same GPS data being fed into
a MicroMite Autopilot, I saw a massive delay in the direction of movement. All GPS, when properly set up, should update
both GPS Position and velocity accurately, every second. Velocity is speed, and the "GPS Heading" or "Course Over Ground",
critical to our GPS-Only or Hybrid Autopilots. It is probable that this problem can be fixed by changing the Globalsat BR355-S4
settings. If not, the GPS will need to be changed. This is the first time Robin has seen this problem in decades
of working with GPS. Priority tasks are to see if our Picaxe 28X2 Autopilot in Boat 11, being prepared for the 2017
Atlantic Attempt, has this problem*. Also, our spare GPS-Only autopilots. It is also of critical importance to longer term
experimental work, such as the new MicroMite based Autopilot. Robin must have wasted several hours looking for
software bugs, when the poor steering was down to the poor data coming from the GPS ! * Good News update at 1430: a tea tray test
of Boat11's Autopilot showed rapid rudder turning, in the correct direction, within the 7 second control cycle.
This is the same type of Globalsat BR355-S4 GPS, with "G-Star IV" written on it's black plastic case.
More Good News at 1500: Boat12's MicroMite Autopilot, with a BR355-S4, loaded with same latest version "Alpha" of software,
worked OK, with rapid steering changes in response to change of movement direction. So perhaps it's just this one BR355
that needs to be fixed.
Footnote on Wednesday 6th September 2017:
Thanks to Jesse at Globalsat in USA, we are trying a firmware patch that I have saved in
rbpatch2.zip
. Running the patchS4_S-0PC-12-1307121.exe applied the patch, but this is still
our old Version2:F-GPS-4R-1201127. This seems to be the same EXE as in our old patch.
This firmware should have static navigation & smooth heading filtering disabled.
We still seem to have smooth heading filtering enabled.
 Monday 4th September 2017:
Click on the picture on right to see Boat 11's wiring, after three pairs of Futaba connectors were replaced by soldered joints,
covered by heat-shrink rubber sleeve. Why three pairs ? - because of the servo reverser, now between Picaxe 28X2 computer
and the Acoms AS17 servo, needed for our new rudder linkage geometry. We considered "insulation paint", or varnish,
but the rubber sleeves hide Robin's dry-joint soldering from Roy much better ;-) This photo was taken before the
SPOT Trace power Futaba connector was also replaced. Luckily, The wires are also now soldered onto those two "power studs",
coming out of SPOT Trace. This was after discovering the wires were loose, when movement of Boat11 did not
result in an update to
Snoopy's SPOT Trace Map
. It does now.
The three Futaba Male connectors that plug into rising pins on the Autopilot Picaxe 28X2 board are now replaced
by soldered wires onto the pins.
Boat11 is ready for another Bray Lake Test, then a dose of 24/7 testing there.
Monday 4th September 2017:
Click on the picture on right to see Boat 11's wiring, after three pairs of Futaba connectors were replaced by soldered joints,
covered by heat-shrink rubber sleeve. Why three pairs ? - because of the servo reverser, now between Picaxe 28X2 computer
and the Acoms AS17 servo, needed for our new rudder linkage geometry. We considered "insulation paint", or varnish,
but the rubber sleeves hide Robin's dry-joint soldering from Roy much better ;-) This photo was taken before the
SPOT Trace power Futaba connector was also replaced. Luckily, The wires are also now soldered onto those two "power studs",
coming out of SPOT Trace. This was after discovering the wires were loose, when movement of Boat11 did not
result in an update to
Snoopy's SPOT Trace Map
. It does now.
The three Futaba Male connectors that plug into rising pins on the Autopilot Picaxe 28X2 board are now replaced
by soldered wires onto the pins.
Boat11 is ready for another Bray Lake Test, then a dose of 24/7 testing there.
Saturday 9th September 2017:
Bray Lake 24/7 Testing has started ! The hint of rain was enough to detere Robin from another Bray Lake Test, so Snoopy was
put on 24/7 Test at about 1240 BST (1140GMT). Only the GPS Logger test equipment was left on board. The wind was sometimes
a bit too gentle for movement to trigger SPOT Trace reports, but we are getting them every 5 minutes,
when the wind is strong enough (~10mph?). Robin visited the lake just after 8pm, as it was getting dark, and Snoopy was
still sailing, with a light wind of perhaps 3 to 5 mph - enough to move the Clubhouse flags. No SPOT Trace reports, of course.
See
Snoopy's SPOT Trace Map
. Below are some stills that will have to do for a while. Click on them to enlarge.
We can expect Snoopy to drift in to the bank if the wind drops near to dead calm,
or if something breaks ! :-)
![]()

![]()
 Sunday 10th September 2017:
The wind dropped overnight, to less than that shown by
Met Office Site
.
We expect the boat to have drifted east, probably onto the north bank.
But we were wrong ! As the wind came up, SPOT Trace 5 minute position reports resumed, showing Snoopy still on his 24/7 mission.
Sunday 10th September 2017:
The wind dropped overnight, to less than that shown by
Met Office Site
.
We expect the boat to have drifted east, probably onto the north bank.
But we were wrong ! As the wind came up, SPOT Trace 5 minute position reports resumed, showing Snoopy still on his 24/7 mission.
But at about 1400 BST the Wind was too strong for Snoopy to hold station. The Met site says wind may have been 20mph gusting to over 30mph.
That's what it seemed when Robin and June collected him at about 1630. Everything was still working, and no water got into his box.
The 1 sec GPS Logger had recorded data from launch at ~1140GMT until 1956 when it's battery went flat. We'll avoid that
problem next time, because the plot shows light wind wandering well. The GPS data is in
rb090917.nme
. Click on the displayed plot to expand it.
There is now a boring 9 minute video :-)
Monday 11th September 2017:
Latitude/Longitude details of Snoopy's 24/7 test area are in
Snoopy's 24/7 Map
, now in GPSS, used to display the plots.
Snoopy was put back on 24/7 duty again at about 1705 BST, with Robin and June missing a shower but catching a rainbow.
The 1 sec GPS logger now also gets main 5v power, so should last the whole mission. After getting home, Robin was surprised
to see how close Snoopy came (downwind) to the North bank at about 1807.
The
Met Office Site
indicates wind was from West at about 15 but gusting to over 30 mph.
The trees tend to bend wind towards the North bank.
Tuesday 12th September:
12 hour pause in SPOT Trace reports (833pm-841am) due to Wind below 10mph. A "Movement Alert" email also came in at 0841 BST. Snoopy is still on station :-)
How about programming the MicroMite, in Boat 12, with the Mobius Camera, for a "Bigger Bray Lake Test", and see if it can get some video close-ups
of Boat 11 on 24/7 without a collision ? Click on pictures below :-)
Snoopy hit the north shore by 1844 BST in winds from the South-South-West of about 18 gusting to over 30 mph.
See
Snoopy's SPOT Trace Map
.

 Normal service will be resumed as soon as possible - after Robin finds the micro SD card that shot out of the Mobius camera !
It's somewhere in his not-so-tidy Study :-|
Normal service will be resumed as soon as possible - after Robin finds the micro SD card that shot out of the Mobius camera !
It's somewhere in his not-so-tidy Study :-|
Wednesday 13th September 2017:
Meanwhile, here are two plots from the MicroMite steered Boat12 GPS Logger data in
rb120917.nme
. A software bug is suspected*, but it did manage that close approach to Boat11 - on that missing SD card !
Boat11 waits to be collected from the north bank.... BUT, at 0927 BST SPOT shows that Snoopy
has sailed back out onto 24/7 duty again ! Wind seemed to be 20 gusting to over 30 mph from West-South-West.
SD Card found ! Click on Mobius video frame on right :-)
![]()
![]()
Boat11 is safely back home, and in full working order. Click on the plots and pictures below. Robin spoke to Norman,
the friendly fisherman, who had pushed Snoopy out this morning. He also pointed out where Snoopy had gone
- into the "thicket" of nettles and trees, and gave some tips on suitable "sea-worthy" materials.
Wind had been 20 gusting to 30+ mph from West South West, when Snoopy came ashore.
For those interested, the 11.6MB of 1 sec GPS Logger data, used for the plot below, is in
rb11247b.nme
. The GPS Plots are made using my free GPS Software on the
Download
page.
* the suspected software bug in Boat12's MicroMite Autopilot software was found and fixed. So Boat12,
with version "Alpha 13th September" may steer better on another "Big Bray Lake Test".
Friday 15th September 2017:
The video, and observation of the boat trying to go upwind, indicates that it might benifit from the Jib boom being
held down, with that cross bar thought of before. This has now been done, using three sliding fit brass tubes ( for strength ), smeared
with Isopon P40, and soldered to the brass "pegs" either side. A quick-link, tied to the Jib, slides along the cross bar. If this breaks,
there is still the string from the jib to the mast, near the mainsail boom. Click on the picture below. Boat 11 is now ready for more Bray Lake testing.
Experimental work on things like the
MicroMite
Autopilot in Boat 12, will be reported in
BlogX
.
Saturday 16th September 2017:
LOOSE RUDDER ! "Full working order" above ??? Today the rudder was found to have come completely loose, and due to the familiar problem of the grub screw having come undone.
Robin used the Alen Key to tighten it firmly, but deliberately did not apply Loctite or resin - we will see what more 24/7 tests do !
Boat 11 was put back onto 24/7 at 1219 BST in very light wind of about 6mph from Nor-Nor-West - made even less by shielding from
trees. SPOT Trace position reports will be infrequent in these conditions. It will be interesting to see the 1 sec GPS Logger plot,
after this latest "247C" session, to see if the tighter jib improves sailing.
![]()
![]() Click on the pictures below to see the detail.
Local Wind
speed is dropping to below 3mph towards zero
and we expect Snoopy to wander tonight. At about 6pm Snoopy was managing about 0.25 mph, to sail between
the two 24/7 waypoints about 111 yards apart in about 15 minutes. Robin saw two deer, but he also
managed to get his car locked in - like Dick a few years ago :-) His wife collected him from
La Spiga, a short walk away, so this ended OK. He may have to get a taxi to collect his car tomorrow.
All on video, of course :-)
Click on the pictures below to see the detail.
Local Wind
speed is dropping to below 3mph towards zero
and we expect Snoopy to wander tonight. At about 6pm Snoopy was managing about 0.25 mph, to sail between
the two 24/7 waypoints about 111 yards apart in about 15 minutes. Robin saw two deer, but he also
managed to get his car locked in - like Dick a few years ago :-) His wife collected him from
La Spiga, a short walk away, so this ended OK. He may have to get a taxi to collect his car tomorrow.
All on video, of course :-)
Sunday 17th September 2017:
Snoopy may have wandered when the wind dropped to near zero, but by 1100 he was back on (slow) 24/7 duty again.
Tuesday 19th September 2017:
BlogX
is updated with a video of Boat11 still on 24/7 yesterday. We got an update on the
SPOT Trace Map
when the
Local Wind
rose briefly.
![]() Wednesday 20th September 2017:
Click on the SPOT Trace map below to read details. The video from yesterday, now in
BlogX
, is also below.
Robin went over to Bray Lake by about 1030 and was surprised to see Snoopy's
Boat11 back out on 24/7. Andy in the Clubhouse solved the puzzle of how we got those position reports yesterday evening.
We will have to wait until we look at the 1 second GPS logger before we get clues to if Snoopy made his own way back out.
Being pushed out by a friendly paddle-boarder would probably have created enough vibration to trigger a SPOT Trace report.
Snoopy may have done a lot of stealthy wandering last night :-)
Wednesday 20th September 2017:
Click on the SPOT Trace map below to read details. The video from yesterday, now in
BlogX
, is also below.
Robin went over to Bray Lake by about 1030 and was surprised to see Snoopy's
Boat11 back out on 24/7. Andy in the Clubhouse solved the puzzle of how we got those position reports yesterday evening.
We will have to wait until we look at the 1 second GPS logger before we get clues to if Snoopy made his own way back out.
Being pushed out by a friendly paddle-boarder would probably have created enough vibration to trigger a SPOT Trace report.
Snoopy may have done a lot of stealthy wandering last night :-)
Thursday 21st September 2017:
Robin watched Snoopy taking over 30 minutes, to go from 24/7 North to South waypoints, upwind, against a 10mph breeze.
But he took only 3 minutes downwind ! Segway Bay is a good observation spot: "North" is just left of the footbridge, and "South"
just right of the lone tree.
Monday 25th September 2017: Boat11 has now been on 24/7 duty for 9 days. Today I watched him do 3 x 111 yards in 15 minutes. i.e. ~ 0.75 mph which is 15% of a 5mph Easterly wind. But we don't have accurate wind speed. The Met Office Site said 5 to 7mph but Local Wind said nearer 2 mph. BlogX has details of Snoopy's Windmill Boat being converted into a rescue boat. It's first mission may be to recover Boat11 from 24/7 duty, before the big swimming event at Bray Lake next Saturday. The GPS Plot is in RB247C.NME .
![]()

![]()
Tuesday 26th September 2017:
Boat 11 is now safely back home, after a visit to Bray Lake by Dick and Robin. Click on pictures to enlarge or play. Snoopy's boat is ready ! :-)
![]()



![]()
 Thursday 5th October 2017:
Dick and Robin took the opportunity of a good breeze of 10 to 15mph from the North West, to give Snoopy
one last Bray Lake Test before his Atlantic Attempt. But, he sailed horribly.
The boat failed to steer in a stable direction at good speed.
On the first attempt Snoopy made "Alpha", but then ended up on the north shore,
east of the Clubhouse. The second attempt: he also made Alpha, but ended just west of the Base.
The clouds and Met Office site supported "North West", but waves and the Boat seemed
to indicate nearer to West - which meant "Alpha" to "Bravo" was directly upwind.
Dick noticed the boat suffering too much Lee Helm. i.e. tending to turn downwind.
The GPS logger plots have been lost, but the videos, have the record.
As soon as Robin started taking stills from the camcorder video,
he discovered the problem - the angles of jib and mainsail booms:
they should both be at 30 degrees.
Look at the angle of them in that video frame !
At first Robin thought
the cross bar mechanism allowed the jib to catch part way,
but it seems to be just the lenghths of the strings ( sorry sailors: "sheets" ).
We can look for this when the Mobius video is ready.
All of Snoopy's boats have worked best when the mainsail and jib booms are allowed to swing out to 30 degrees.
Boom angle measurements, based
on Tan(30)=0.577, indicate that the mainsail boom swings out to 32 degrees, but the jib boom only swings
out to 18 !
Answer: try again, but after adjusting the sails,
so that both booms can swing out to 30 degrees.
Also might that original smaller rudder work better ? But first the sails.
Friday 6th October update: Jib sail is adjusted ready for test.
Click on pictures to enlarge or play.
Thursday 5th October 2017:
Dick and Robin took the opportunity of a good breeze of 10 to 15mph from the North West, to give Snoopy
one last Bray Lake Test before his Atlantic Attempt. But, he sailed horribly.
The boat failed to steer in a stable direction at good speed.
On the first attempt Snoopy made "Alpha", but then ended up on the north shore,
east of the Clubhouse. The second attempt: he also made Alpha, but ended just west of the Base.
The clouds and Met Office site supported "North West", but waves and the Boat seemed
to indicate nearer to West - which meant "Alpha" to "Bravo" was directly upwind.
Dick noticed the boat suffering too much Lee Helm. i.e. tending to turn downwind.
The GPS logger plots have been lost, but the videos, have the record.
As soon as Robin started taking stills from the camcorder video,
he discovered the problem - the angles of jib and mainsail booms:
they should both be at 30 degrees.
Look at the angle of them in that video frame !
At first Robin thought
the cross bar mechanism allowed the jib to catch part way,
but it seems to be just the lenghths of the strings ( sorry sailors: "sheets" ).
We can look for this when the Mobius video is ready.
All of Snoopy's boats have worked best when the mainsail and jib booms are allowed to swing out to 30 degrees.
Boom angle measurements, based
on Tan(30)=0.577, indicate that the mainsail boom swings out to 32 degrees, but the jib boom only swings
out to 18 !
Answer: try again, but after adjusting the sails,
so that both booms can swing out to 30 degrees.
Also might that original smaller rudder work better ? But first the sails.
Friday 6th October update: Jib sail is adjusted ready for test.
Click on pictures to enlarge or play.
![]()



![]()
Saturday 7th October 2017:
Click on pictures to enlarge. Dick and Robin tested Snoopy's Boat11, with the adjusted jib boom angle,
in a strong south-westerly 15mph wind. He failed miserably, but it seems likely it was due to the larger rudder
causing the boat to turn too quick. i.e. over-steering and not holding a tack long enough. Conclusion:
try again but with the original smaller rudder. The GPS logger failed, with an empty file, so that needs
to be fixed. We do have a spare. The video will show what happened, far better :-)
![]()



![]()
![]() Sunday 8th October 2017:
Boat11 was given another test, with replaced rudder and GPS Logger. Click on pictures for detail.
e.g. the GPS Logger Plot data in
RB081017.NME
, showing that unwanted "zig-zag" path from "Charlie" to "Delta".
Wind was very light, at perhaps 4 mph or less from the West-South-West.
The video below shows the conditions and boat behaviour better.
More Bray Lake tests are expected this coming week - hopefully with more wind !
Sunday 8th October 2017:
Boat11 was given another test, with replaced rudder and GPS Logger. Click on pictures for detail.
e.g. the GPS Logger Plot data in
RB081017.NME
, showing that unwanted "zig-zag" path from "Charlie" to "Delta".
Wind was very light, at perhaps 4 mph or less from the West-South-West.
The video below shows the conditions and boat behaviour better.
More Bray Lake tests are expected this coming week - hopefully with more wind !
![]()

![]()
Tuesday 10th October 2017:
Boat 11 was tested again, with "jib bar stops" and replaced GPS Logger ( corroded one is under repair).
Wind was ~10 mph from the South West, and Snoopy eventually completed the Bray Lake Test.
The GPS Plot below is in
rb101017.nme
. Main 5v Power was LHS 5.26v, RHS 5.25v -> 4.83v.
Wednesday 11th October 2017:
Yesterday's video is below, followed by that for today's sail in strong wind. Click on pictures to enlarge or play.
The GPS Logger data for the plot below is in
rb111017.nme
.
Boat 11 coped well, but needs minor(?) work:
![]()
![]()
Thursday 12th October 2017:
Robin adjusted the rudder servo linkage: Maximum Left was 30, and right 50;
Now 40 and 60; Thought not to matter.
Side wind on the FM Bug transmitter, and it's antenna, might have reduced Lee Helm needed for natural tacking.
See new position, with wire up the rear stay, as for earlier FM Tx.
Click on photos.
Friday 13th October 2017:
Snoopy's three attempts at Bray Lake were recorded by the GPS Logger in
rb131017.nme
. The video is now below.
![]()

![]()



![]()
Wednesday 18th October 2017:
Might we have a problem with the Autopilot GPS settings being lost ?
Globalsat BR355-S4 settings being "forgotton", like Static Nav OFF, and/or Smoothed Heading OFF,
would give under-steering and zig-zag sailing that we saw.
However, the GPS in Boat11 seems OK, and so we have not yet diagnosed the zig-zag sailing. Was it balance ?
The problem of settings being "forgotton"
needs to be fixed in the longer term, for future boats. e.g. use a different GPS or find out what value bytes
are needed on startup by the autopilot software, to reset the required settings,
if needed by the GPS used.
Thursday 19th October 2017:
Was Zig-Zag steering caused by our reducing rudder movement ? That might also explain failing to turn earlier. But why we did we not hear TTS or rudder movements ?
GPS Logger data is in
rz131017.nme. Sadly, the Mobius video camera battery was flat by then. The rudder was changed.
Click on pictures to play or enlarge.
![]()
![]() The rudder linkage was moved and now full left servo is 45 and right 55 degrees.
This due to Picaxe software servo constants ( CENTRE=150, THROW=50 ), unchanged since before Snoopy's 2012 Atlantic Attempt.
The linkage arm lengths of 17mm (servo) and 22mm (rudder), reduce angles by 0.77 to full Left rudder 35,
and full right 42 degrees. As said earlier, difference in rudder left and right should not cause problems
- other than another source of confusion. Centre rudder does seem to be centre ! The 1N5819 Schottky diodes (1A 40v)
suggested by Peter were added, as additional parallel pairs, to LHS and RHS solar supplies. These only drop 0.28v instead of the more typical 0.7v.
The result was our main 5v supply being 5.01v with 5.3v LHS and 5.32v RHS. Future boats may use these on the back of the solar
panels too. Below is BR355-Ardulog circut, from 3rd August above, needed to fix that spare GPS Logger.
The rudder linkage was moved and now full left servo is 45 and right 55 degrees.
This due to Picaxe software servo constants ( CENTRE=150, THROW=50 ), unchanged since before Snoopy's 2012 Atlantic Attempt.
The linkage arm lengths of 17mm (servo) and 22mm (rudder), reduce angles by 0.77 to full Left rudder 35,
and full right 42 degrees. As said earlier, difference in rudder left and right should not cause problems
- other than another source of confusion. Centre rudder does seem to be centre ! The 1N5819 Schottky diodes (1A 40v)
suggested by Peter were added, as additional parallel pairs, to LHS and RHS solar supplies. These only drop 0.28v instead of the more typical 0.7v.
The result was our main 5v supply being 5.01v with 5.3v LHS and 5.32v RHS. Future boats may use these on the back of the solar
panels too. Below is BR355-Ardulog circut, from 3rd August above, needed to fix that spare GPS Logger.
Friday 20th October 2017:
Dick and Robin took Boat11 and Boat12 for "Quick Bray Lake Test" (just Clubhouse to Delta and back to Base).
Wind was strong at 15mph+ from the West-South-West. Here are some frames from the video, still to be processed.
In short: Boat11 seemed to do well, from the Clubhouse to Delta, despite what the GPS Logger said.
It's data is in
rb201017.nme
.
That's the first time Robin has seen that problem ! Some may wish to read about
GPS Spoofing
:-)
Boat12, with the same autopilot software, was launched soon after,
and soon had done two tests, while Boat11 was still trying to get back to Base. Boat12 then did the full Bray Lake Test
with success, despite much being against the strong wind of 15mph+ from the West South West. There was no GPS Logger
on this Boat12. Dick pumped up his dingy, to go out for Boat11, but Snoopy saw him coming, and took the
"scenic route" with Dick as escort. There was a BIG difference: this attempt from Delta to Base was "all over the place"
as seen by the GPS Lgger plot. Dick finally coaxed Boat11 back to shore.
Saturday 21st:
Video now below. Dick noticed no SPOT Trace reports on the water - despite movement !
GPS problems need investigation. Click on pictures to enlarge.
![]()

![]()

![]() Monday 23rd October 2017:
Autopilot problem diagnosed as dry soldered joint. Repairs were made. Boat 11 is ready for test.
See
BlogX
. Click on pictures.
Monday 23rd October 2017:
Autopilot problem diagnosed as dry soldered joint. Repairs were made. Boat 11 is ready for test.
See
BlogX
. Click on pictures.
 Wednesday 25th October 2017:
Yesterday's Bray Lake Test was aborted, because, yet again, the autopilot GPS failed to track.
i.e. no speech, no rudder movements, and the red LED on the BR355-S4 GPS failed to blink.
The GPS was changed to remove doubt, from S/N S4R0004640 to S/N S4R0049632. There
is now a "window" on the side of the box lid, so we can see the GPS LED.
Faults seen by Dick were corrected: soldering a loose wire that trickle charged the I-GotU,
and a short on the spare GPS Logger, which is now fixed and on Boat12.
The Autopilot Test box now has a Futaba lead, as another means of testing with
an external GPS.
Wednesday 25th October 2017:
Yesterday's Bray Lake Test was aborted, because, yet again, the autopilot GPS failed to track.
i.e. no speech, no rudder movements, and the red LED on the BR355-S4 GPS failed to blink.
The GPS was changed to remove doubt, from S/N S4R0004640 to S/N S4R0049632. There
is now a "window" on the side of the box lid, so we can see the GPS LED.
Faults seen by Dick were corrected: soldering a loose wire that trickle charged the I-GotU,
and a short on the spare GPS Logger, which is now fixed and on Boat12.
The Autopilot Test box now has a Futaba lead, as another means of testing with
an external GPS.
Peter, Dick and Robin took both boats 11 and 12 for Bray Lake Test. The test box showed that the
GPS taken out of Boat 11's autopilot worked OK. Boat 12 completed three Bray Lake Tests OK,
but it carried the spare GPS Logger which is still faulty: no data recorded.
The GPS Plot for Boat 11 is below, and the data is in
rb251017.nme
. The data shows the GPS Logger losing GPS signal regularly after about 1407 GMT.
Note that this is not the same GPS as in the autopilot. Boat 11 sailed poorly,
until it hit "Charlie" by mistake, trying to tack to "Bravo".
The wiring connecting the autopilot GPS to the Picaxe was inspected and poked,
with the autopilot running indoors: no problem found yet - how annoying ! A Youtube video will
be edited and uploaded tomorrow, but before that, notes will be
made, from two hours of Mobius camera video and sound. e.g. when was the autopilot talking ?
Thursday 26th October 2017:
Answer: not all the time after Charlie. No simple explanation found yet.
Two more Ardulogs were ordered for testing, such as recording the Autopilot GPS data.
Click on pictures to enlarge or play.
![]()

![]()
Friday 27th October 2017:
Our recent GPS problems are solved: Videos below shows why and the reward. GPS Logger plot of
rb271017.nme
is below. Great ! :-)
![]()


![]()
Sunday 29th October 2017:
Yesterday's sailing with Dick and Robin, was in a gentle breeze of 10 mph from the west,
which meant that it took Snoopy's Boat 11 1.5 hours to reach "Bravo", upwind from
"Base" and "Alpha". However, he made the return in 15 minutes, with a
brilliant automatic docking at the Clubhouse. The GPS Logger data is in
rb281017.nme
.
Inspection of Boat 11 showed that the rudder
was offset 10 degrees right: reason unknown. That might explain the "right tendancy"
in the plot. The rudder was recentered, and the rudder gearing increased by about 25%,
by moving the link one hole in: 22mm to 17mm.
Sunday's Bray Lake Test: see GPS Logger Plot of
rb291017.nme
below. Wind from the north was lighter than hoped. Boat 12 did the circuit OK, but Boat 11
got stuck on the island, and had to be coaxed back by Dick in his dingy. More here in due course.
Click on pictures to enlarge or play.
![]()

![]()


![]()
Tuesday 31st October 2017:
GPS Logger plots show a tendancy to turn to the right, so the rudder was re-centred.
Both boats were taken for Bray Lake Test in a light wind of maybe 6mph from the South West.
Boat 12 did three circuits. Boat 11 eventually made it upwind to Bravo,
after almost two hours, but then came back in 12 minutes ! Path B-C-D-Base was straighter.
GPS Logger data for plot below is in
rb311017.nme
. The video is expected tomorrow.
Wednesday 1st November 2017:
Meanwhile, some food for thought... Click on pictures to expand.
![]()

![]()
Sunday 5th November 2017:
Peter, Dick, and Robin took both boats for Bray Lake Test in what Robin had hoped would be a North-West wind, to give
a fast trip, without any leg being upwind. The clouds seemed to travel in the correct direction, but not the wind
near ground level. The GPS Plots are in
rx051117.nme
for Boat 12, and in
rb051117.nme
for Boat 11. We still have a problem with Zig-Zag sailing.
Despite this, Peter, Dick, and Robin decided to celebrate at the Riverside Brasserie.
Dick had not needed to pump up his dingy :-)
Monday 6th November 2017:
We may try reducing the width of the keel.
Click on pictures to expand or play the video now below.
![]()

![]()
Wednesday 8th November 2017:
Click on the picture to expand: smaller keel on Boat 11, ready for Bray Lake soon.
Friday 10th November 2017:
Boat 11 and Boat 12 did fast Bray Lake Tests in a wind of about 10mph from the North West.
Boat 11 took 32 minutes but the lighter Boat 12 took just 19 minutes.
The GPS Logger data for Boat 11 is in
rb101117.nme
.
That for Boat 11 is in
rx101117.nme
.
Zig-Zag sailing can still be seen. The video may reveal more: now below.
![]()
![]()
Monday 13th November 2017:
Boat 11 now has a skeg, to increase Lee Helm, and now seemed a good time to compare the two boats, with this in mind.
The video below shows a new idea for combining the GPS Logger data and Mobius video, as a means of analysing
results from a Bray Lake Test. Another idea is the polar plot from the GPS Logger data, showing how fast the
boat travels in different directions relative to the wind.
Thursday 16th:
More detail is in
BlogX
, including the video below, and new idea of seeing the rudder position in the Mobius video.
Click on pictures to play or expand.
![]()
![]()
 Wednesday 22nd November 2017:
Boat 11 eventually completed the Bray Lake Test, despite the strong wind, and the jib coming loose
- due to Robin's string (sheet) coming undone ! Eric's Boat 12 did two trips around the lake in less time - BUT Robin had not
charged up the GPS Logger battery properly. Some of this Blog6 material may be moved into BlogX,
since it is in the "Experimental" category. e.g. Boat 12 also carried Peter's Compass Logger for test.
The GPS Logger #1 data for Boat 11 is in
rb221117.nme
, it's Autopilot GPS in
ra221117.nme
, and GPS Logger #2 data for Boat 12 is in
rx221117.nme
.
The Jib string was replaced and covered in silicon sealant. Also, a quick link added.
The result is the jib boom pulled in from 30 to about 16 degrees.
This should reduce weather helm more, and improve sailing close to the wind.
We are still trying to diagnose and cure zig-zag sailing of Boat 11.
Click on pictures to play or enlarge.
Wednesday 22nd November 2017:
Boat 11 eventually completed the Bray Lake Test, despite the strong wind, and the jib coming loose
- due to Robin's string (sheet) coming undone ! Eric's Boat 12 did two trips around the lake in less time - BUT Robin had not
charged up the GPS Logger battery properly. Some of this Blog6 material may be moved into BlogX,
since it is in the "Experimental" category. e.g. Boat 12 also carried Peter's Compass Logger for test.
The GPS Logger #1 data for Boat 11 is in
rb221117.nme
, it's Autopilot GPS in
ra221117.nme
, and GPS Logger #2 data for Boat 12 is in
rx221117.nme
.
The Jib string was replaced and covered in silicon sealant. Also, a quick link added.
The result is the jib boom pulled in from 30 to about 16 degrees.
This should reduce weather helm more, and improve sailing close to the wind.
We are still trying to diagnose and cure zig-zag sailing of Boat 11.
Click on pictures to play or enlarge.
![]()

![]()
Thursday 23rd November 2017:
The video from yesterday is now above. Today, in even stronger wind, Peter, Dick, and Robin, took both boats for
Bray Lake Test. Boat 11 eventually completed the circuit, and Boat 12 did it faster.
However, on Boat 12's second attempt, it took on lots of water. It was rescued by Dick in his dingy,
in shorts - despite the cold :-)
Friday 24th November 2017:
Boat 11 GPS logger data is in
rb231117.nme
and that for Boat 12 in
rx231117.nme
.
Click on the GPS Logger plots below to enlarge.
Saturday 25th November 2017:
15 minute "Quick" Bray Lake Test below shows good upwind to Delta, but zig-zag sailing back to Base.
Next video below is to assist understanding of the Zig-Zag path: Combined GPSS replay and Mobius video, from "Bravo" at 1542,
cross-wind through "Charlie" (1544) to "Delta" (1551), then downwind back to "Base".
This extract of the GPS Logger data is in
re231117.nme
.
The full video record of the day shows both Boat 11 and Boat 12 - getting flooded and rescued !
Videos reveal that Boat 11 selected "Delta", near the island, instead of "Alpha",
due to a fluke in startup GPS location.
Monday 27th November 2017:
See first video.
Click on pictures to play or enlarge.
![]()
![]()

![]()
Wednesday 29th November 2017:
From
BlogX
: Just time to upload this video, before Dick and I do another test of Boat 11 at Bray Lake.
Snoopy's Boat is
HERE
!
Robin got home at 1645, after a useful test, with Boat 11 completing the Bray Lake Test in 36 minutes,
due to favourable wind of 7 to 10 mph from the North North West. The GPS Logger plot below is
from the GPS in the autopilot, and in
rb291117.nme
. All the raw GPS data is in
rb291117.txt
. It is good Robin took this extra logger, because the stand-alone GPS logger had no data: Robin had taken
the faulty logger #2 from Boat 12 by mistake. It is yet to be repaired ! See last Thursday 23rd above.
Click on pictures to play videos or to expand.
![]()


![]()
 Thursday 30th November 2017 morning:
Yesterday's video is above. Boat 11 now has Autopilot software version "PaPa" loaded.
Last update was 21st July 5:40pm. See GPS Plots from July in this Blog6.
Today's test may reveal if we have a software bug introduced by the later version "Quebec"
- it seems NO.
Robin about to meet Peter and Dick at
The Fifefield pub, before a Bray Lake Test in what looks like perfect conditions: Wind 11 mph from North-West.
Snoopy's Boat is
HERE.
Click on picture to expand - what a struggle getting Boat 11 into Robin's Study :-)
Thursday 30th November 2017 morning:
Yesterday's video is above. Boat 11 now has Autopilot software version "PaPa" loaded.
Last update was 21st July 5:40pm. See GPS Plots from July in this Blog6.
Today's test may reveal if we have a software bug introduced by the later version "Quebec"
- it seems NO.
Robin about to meet Peter and Dick at
The Fifefield pub, before a Bray Lake Test in what looks like perfect conditions: Wind 11 mph from North-West.
Snoopy's Boat is
HERE.
Click on picture to expand - what a struggle getting Boat 11 into Robin's Study :-)
After return from sailing:
See GPS Plot below from both GPS Loggers: data in
RC301117.NME
is Autopilot GPS followed by Logger #1.
The zig-zag downwind is sufficiently similar to earlier examples,
and deserves closer analysis of Mobius video. e.g. from yesterday, when leaving "Charlie" at 1425 and turning left towards Clubhouse,
before the right-rudder corrected it towards Delta. This 60 second zig-zag might be explained by under-steering. A bigger rudder
might improve this, but it undesirable. A minor software change, to version "Romeo", could be as simple as changing
the 90-Max rudder constant to less, such as 45-Max. More photos and video here in due course.
The day started with a "business meeting" in the pub, and ended with coffee in the Bray Lake Clubhouse.
Peter and Dick brought Roger's "George and Dragon" hull and rig, being built into Peter's new test boat "Woodstock".
This will be reported with other experimental work in
BlogX
, into next year.
Click on pictures to enlarge or play.
Friday 1st December 2017:
The Youtube video is below, for those who want to see it.
Robin and June tool a very early trip to Slough today, for an 0630 hospital appointment:
full anesthetic to fit a plate into her broken wrist.
He took a printout of "Quebec" while he waited,
and saw suitable changes for new version "Romeo". Increased rudder gearing as function
of direction error, which should reduce zig-zag; The better TTS handling, such as "Left 15" more often can be left as is.
Not a software bug but just
a constant that needs to be changed: symbol MAXDERR = 120. This is the error angle
for full rudder. We will try 30 and test again. If it is too small, we may see over-steering, reflected in
a faster zig-zag rate of ~ 14 secs/cycle. We now have version "Romeo" ( AP28X2R.BAS ) in the test box,
and testing has started.
June and Robin placed their food order before lunch: see the menu below.
However, Robin left before they ate, and returned to collect her mid afternoon. She was not
given a doggy bag, but they did get these Wallace and Vomit hats. THEN she dragged Robin out to The Dog and Partridge,
for the Royal Ascot Tennis Club Christmas Dinner ! :-)
![]()




![]()
Wednesday 6th December 2017:
Click on pictures to expand.
Peter, Dick and Robin to Snoopy's Boats 11 and 12 for Bray Lake Test with software version "Romeo" on 1st December.
This gives much more rudder effect as explained earlier. It risks oversteering zig-zag, but also poor upwind performance,
since the "natural taking" relies on the boat gathering speed. The GPS Plot is from GPS Logger #1 data,
in the latter part of
ra061217.nme for Autopilot GPS followed by GPS Logger #1. Both give similar
plots. Both boats, with the same software, failed to do well upwind. They were re-launched from further along the bank,
to get a better cross-wind path to Alpha.
Boat 11 sailed reasonably straight cross wind, but with a fast zig-zag indicating over-steering. Boat 12, carrying Peter's TTS telemetry
and Compass Logger, seemed to behave similarly. We were all confused by Boat 12's new "Rudder Dial": it moved in the opposite direction
to that on Boat 11. See the picture. Is there a simple solution like a mirror ? :-)
Boat 12's GPS LOGGER #2 IS FAULTY ! Sorry Peter, but we have no GPS Logger data for today ! It seems Robin
did not test it properly after replacing the GPS, after it got wet. The Ardulog orange LED flashes, but not the green LED,
as GPS Logger #1. Robin should have replaced the Ardulog and tested it properly ! Videos from the three cameras
has yet to be edited and processed. SOFTWARE CHANGE ! Boats 11 and 12 Autopilots are now loaded with version
"Romeo 6th December 2017", in AP28X2R.BAS, known to Team-Joker guys. Robin made an inspired guess of DIRERR=60 from 30.
i.e. half the rudder gearing as the 30 that sailed today, but still twice the 120 of recent days before.
Why the rush ? Because there is not time to analyse the video before tomorrow. i.e. the ammount the boat turns,
for a given rudder movement. But as is often the case, Robin has probably guessed wrongly :-)
Thursday 7th December 2017:
Click on pictures to enlarge or play.
Yesterday's video is above, with cross-wind extracts from Mobius at end.
Today Peter, Dick and Robin, took Snoopy's Boats 11 and 12 for good Bray Lake Tests: see results below.
Boat 11 GPS Logger data is in
rb071217.nme
, and Robin was very pleased with the result: the whole trip in 38 minutes.
Eric's Boat 12, with the same software, did two trips, even faster, as expected.
The Boat 12 GPS Logger data is in
rx071217.nme
and
ry071217.nme
.
There is a LOT on our video to see, including first water tests of Peter's Team Joker's "Woodstock",
and glimpses of bungee jumping for filming of a Channel 4 TV Pilot. Enjoy the video :-)
See "BlogX", describing background experimental work from 2008 until now.
See the
Recce,
Compass
,
Software
, and many
Blog
pages, for details of the vast ammount of experiments and testing, done over the years.
Yes, there is a lot there, and you need a wide screen to scroll through it.
I wish I'd written the blogs tidier, but they are better than nothing, and my time is precious.
Now WHERE are the details of the autoplots in Boat6 and Boat10 used for that race in July 2014 ?
Play the video to see how well
Snoopy's 2014 boat 10 did against the smaller experimental boat 6 on 11th July 2014.
The speech from the autopilot of Boat6 implies it was using experimental compass-based steering.
i.e. "ahead, ahead, left, ahead", etc. Boat 10 used our old, trusted, GPS-Only steering.
Why did Boat6 win ? Much less weight: see the Blog for Boats 11 and 12 having a race
with identical autopilots on Thursday 6th July 2017, three years later.
We can learn a lot from what we did in earlier years, if we write it down -
or better still, film it :-)
How the web counters work - or don't work - is explained near the bottom of the
Snoopy page. Times are accurate but location is often not.
![]()


![]()
![]()

![]()
this Blog of Boat 11 repairs and test continues on
Blog7
![]()
Other stuff ...
![]()
Snoopy's Bray Lake Test ... sail 530 metres automatically, through 5 waypoints ...

Who is visiting this page ?

© 1991-2017 Robin Lovelock. Please credit www.gpss.co.uk if you use material from any of these pages. Thankyou.