

You probably reached this "Blog3" page from that called
GPS Guided Trans-Atlantic Robot Boat,
or the
Design of Snoopy Sloop page
.
If not, click on a link to know more.
Each "blog" page describes detailed work preparing for the next Atlantic Attempt.
i.e. covering a period in the region of a year: less if more than one attempt is made.
The Blog pages were started after the first 2012 Attempt, where Snoopy's boat was lost. All later attempts were
with the same boat, sometimes after major repairs. The blogs provide online "Engineering Notebooks",
providing a day-by-day account of repairs, changes, and testing: mostly testing.

 These blog pages are mostly about numerous repairs to the boat, results from "BRAY LAKE TEsts", or 24/7 reliability testing on Bray Lake.
i.s. Snoopy sailing back and forth over a 24/7 waypoint in "Snoopy Corner". This is typically for several weeks,
in all weather, including gale force winds.
Sometimes, a few things happened which resulted in amusing pictures or stories,
such as countering human-intervention, or testing the wheels for Snoopy's trolly.
Click on the pictures either side for larger versions, or visit earlier blogs above.
BlogX, the "blog of experiments", shows ideas and products, some of which may appear
in future boats.
These blog pages are mostly about numerous repairs to the boat, results from "BRAY LAKE TEsts", or 24/7 reliability testing on Bray Lake.
i.s. Snoopy sailing back and forth over a 24/7 waypoint in "Snoopy Corner". This is typically for several weeks,
in all weather, including gale force winds.
Sometimes, a few things happened which resulted in amusing pictures or stories,
such as countering human-intervention, or testing the wheels for Snoopy's trolly.
Click on the pictures either side for larger versions, or visit earlier blogs above.
BlogX, the "blog of experiments", shows ideas and products, some of which may appear
in future boats.
This is a record of repairs and changes made to the boat, after the Atlantic Attempt in September 2014. See Blog1 or Blog2 for earlier progress.
I start this blog on 25th August, to give slight overlap with Blog2, so you can see preperation for the September 2014 Attempt.
Monday 25th August: 70 days (over 10 weeks) sailing without failure, on Bray Lake, waiting for the Atlantic launch window. Wanders when no wind.
 Wednesday 27th August: Snoopy home to recharge low batteries (no sun for days) and a clean.
Wednesday 27th August: Snoopy home to recharge low batteries (no sun for days) and a clean.
Thursday 28th August: Snoopy Sloop 10 was put back onto 24/7 duty at 0925 and the SPOT map reset, for clarity. Click on the
picture on the right, to see the bigger version, of boat 10 with the new boat 11, being prepared for next year's 2015 attempt.
Boat 11 had it's maiden sail earlier this week, and has already completed The Bray Lake Test four times. A few more months
will be needed, before this new boat is ready. The duplicated 5v batteries in boat 10 were very low, at about 3.5v, and were
fully charged last night ( 5.36,5.35->5.13v dropping to 5.9v after switching on for several minutes). Some of the scum was washed
off the hull, and the faded plastic flag, at the top of the mast, replaced by another. Boat 10 had taken on some more water,
into the hull, and now weighs 16.15 kg. Compare this with an almost identical new boat 11 which is nearer 10 kg ! Boat 10
(previously Boat 9) has had a lot of repairs, since it was built in 2013, but more care has been paid to weight in the new boat.
The draft of Boat 10 is 37cm/14.5" but that of Boat 11 is 46cm/18", requiring one to wade out further for launch or recovery.
Tuesday 2nd September: 77 days (11 weeks) continuous sailing without failure, on Bray Lake, waiting for the Atlantic launch window.
Maybe this coming weekend ?
Wednesday 3rd September: brought home to Sunninghill ready for possible launch. Power OK (4.82,4.96->4.69v) and weight 16.15 kg.
Saturday 6th September 2014: Atlantic Attempt: details are on September 2014 Attempt Page. Repairs need to be made to the boat, for relaunch before the end of 2014.

 Sunday 7th September:
Everything seemed to work as it should, within the
expected design constraints of handling light wind and strong tidal current.
Sunday 7th September:
Everything seemed to work as it should, within the
expected design constraints of handling light wind and strong tidal current.
The I-GotU did it's job, although this was only added to comply with Microtransat rules. The SPOT tracking worked flawelessly, and continues to do so.
Tuesday 9th September: Damage was inflicted when the boat was washed up on the shore: the rudder servo must be replaced, due to stripped gear teeth. I have some spare Acoms AS-17 servos here, but have ordered three new ones, from my usual ebay Hobby Power source at �17, delivered.
The keel needs to be replaced. It did not break (fall appart) until we took it out of the car, when home. However, inspection shows the wood was rotten, and only a small (original) flange was holding the (already repaired) keel to the hull. You may want to look at 28th May on Blog1 when the keel was last repaired. It seems that wood had been sailing almost continually for over two years ! It's good that this recent break is not where I repaired it.
This keel will be completely replaced, and we will try and reduce the weight of the boat, which has crept up to 16 kg. Of this, 5.2 kg is the keel. I've ordered another f/g keel bulb and lead shot, the same as used in Boat 11 (see picture of both boats above). I've drilled out a 3" (75mm) deep slot, about 5.5" (140mm) long, into the rotten remains of the old keel, and was pleased to see wood either side from the original hull woodwork. My wife's hairdryer is being used to dry out the slot. Tomorrow I hope to get some marine plywood for the new keel. I expect this to be somewhere between the depths of the old Boat 10 keel, and that on Boat 11. i.e. to give the same "righting moment" but to minimise depth for convenience of beach launches and Bray Lake testing.

 Wednesday 10th September: a lot of driving about today, but two things to report here: the local Ascot News had
printed an article on the front page. If you want, you can read it by clicking on the left picture - if you can
enlarge it enough ! I was surprised to read that I am a "model expert". I must attend more fashion shows and chat to them.
The first I knew of this was when the author, Louise, range me on Monday. It seems their Rhodri Andrews had been keeping
an eye on gpss.co.uk - well done Rhodri ! Their picture must have been taken nearly two years ago - when boat 9
was being started !
The most important visits of the day were to Michael Dennett, the Boat Builders
near Chertsey. This was to collect an off cut of 10mm marine plywood for the keel. I saw Michael briefly in the morning,
but he was rushing off to the Southampton Boat Show, where they have two boats near the entrance. His son, Steve,
kindly range me, and when I visited in the afternoon, did not want anything for the piece. He was as horrified as I was,
when I told him that those rotten remains seem to have been chipboard ! Click on the picture on the right
to visit their web site.
Wednesday 10th September: a lot of driving about today, but two things to report here: the local Ascot News had
printed an article on the front page. If you want, you can read it by clicking on the left picture - if you can
enlarge it enough ! I was surprised to read that I am a "model expert". I must attend more fashion shows and chat to them.
The first I knew of this was when the author, Louise, range me on Monday. It seems their Rhodri Andrews had been keeping
an eye on gpss.co.uk - well done Rhodri ! Their picture must have been taken nearly two years ago - when boat 9
was being started !
The most important visits of the day were to Michael Dennett, the Boat Builders
near Chertsey. This was to collect an off cut of 10mm marine plywood for the keel. I saw Michael briefly in the morning,
but he was rushing off to the Southampton Boat Show, where they have two boats near the entrance. His son, Steve,
kindly range me, and when I visited in the afternoon, did not want anything for the piece. He was as horrified as I was,
when I told him that those rotten remains seem to have been chipboard ! Click on the picture on the right
to visit their web site.
 Thursday 11th September: before deciding the new keel shape, and getting out the saw on the plywood, I thought it
would be prudent to do some sums, so that the new keel is less likely to need modification after it's Bray Lake Tests.
It occured to me that plywood is lighter than water, so making the keel bigger might reduce the effective weight of the keel.
I weighed the old, detached keel (right), and saw the weight of 5.5kg reduced to 3.5 kg in water. i.e. it displaces 2L.
So, since it's CoG is roughly 20cm below the hull, that's a "righting moment" of 20 x 3.5 = 70 kg-cm.
The new keel will be similar to boat 11 (left), using the f/g keel bulb filled with lead shot. This is to reduce work, but
should also give a better result. If the bulb holds 3.2 kg of lead, that needs it to be 70 / 3.2 = 22cm below.
BUT, if that new plywood keel is 20cm wide x 30cm deep, that's displacing 0.6L of water (0.6kg)
but adding it's weight (neglecting resin, etc) of about 0.36kg, adding effective boyancy of roughly 0.24kg.
So, if we take the effective weight of the new keel as 3.2 - 0.24 = ~ 3kg, the depth should be at least 70/3 = 23.3cm.
i.e. total depth, from hull to bottom of bulb, of about 27cm. Boat 11 is 40cm, and I've already seen significantly
more difficulty at Bray Lake, wading in for launch or recovery, compared with boat 10's old keel of 25cm.
So, let's go for a new keel depth about 30cm. i.e. 10cm/4" less water up my wellies, or towards my waist ! :-)
Thursday 11th September: before deciding the new keel shape, and getting out the saw on the plywood, I thought it
would be prudent to do some sums, so that the new keel is less likely to need modification after it's Bray Lake Tests.
It occured to me that plywood is lighter than water, so making the keel bigger might reduce the effective weight of the keel.
I weighed the old, detached keel (right), and saw the weight of 5.5kg reduced to 3.5 kg in water. i.e. it displaces 2L.
So, since it's CoG is roughly 20cm below the hull, that's a "righting moment" of 20 x 3.5 = 70 kg-cm.
The new keel will be similar to boat 11 (left), using the f/g keel bulb filled with lead shot. This is to reduce work, but
should also give a better result. If the bulb holds 3.2 kg of lead, that needs it to be 70 / 3.2 = 22cm below.
BUT, if that new plywood keel is 20cm wide x 30cm deep, that's displacing 0.6L of water (0.6kg)
but adding it's weight (neglecting resin, etc) of about 0.36kg, adding effective boyancy of roughly 0.24kg.
So, if we take the effective weight of the new keel as 3.2 - 0.24 = ~ 3kg, the depth should be at least 70/3 = 23.3cm.
i.e. total depth, from hull to bottom of bulb, of about 27cm. Boat 11 is 40cm, and I've already seen significantly
more difficulty at Bray Lake, wading in for launch or recovery, compared with boat 10's old keel of 25cm.
So, let's go for a new keel depth about 30cm. i.e. 10cm/4" less water up my wellies, or towards my waist ! :-)
 I'll go for a similar shape as the boat 11 keel. i.e. 19.5cm at bottom, to blend in with the keel bulb,
and a little wider where it meets the hull. Time to get the saw out !
... not so much work: on the left is the plywood cut out, before coating in resin, checking it for size,
inserted 7cm deep into the slot in the upturned hull. It narrows where it will insert into the fibre glass
keel bulb. The widest width is 19.5cm and the narrow part 11.5cm. It has now been given a coat of fast-glass resin,
and some resin poured into the bottom of the hull slot, to seal it before final assembly with resin.
I will soon be waiting for Mr Postman, to bring me my keel bulb :-)
I'll go for a similar shape as the boat 11 keel. i.e. 19.5cm at bottom, to blend in with the keel bulb,
and a little wider where it meets the hull. Time to get the saw out !
... not so much work: on the left is the plywood cut out, before coating in resin, checking it for size,
inserted 7cm deep into the slot in the upturned hull. It narrows where it will insert into the fibre glass
keel bulb. The widest width is 19.5cm and the narrow part 11.5cm. It has now been given a coat of fast-glass resin,
and some resin poured into the bottom of the hull slot, to seal it before final assembly with resin.
I will soon be waiting for Mr Postman, to bring me my keel bulb :-)
 The keel bulb arrived, along with three spare AS-17 servos, soon after I got back from Halfords, to buy a large
tin of fast-glass resin and hardener. The servo was the expected simple task, tightening the four screws and
sealing with silicon sealant, then screwing in and soldering the servo lead onto the terminals - not Futaba
sockets here ! There is now a larger warning sign, on the spare bit of deck space between solar panels and box.
It now says "PLEASE DO NOT TOUCH this boat if on water" after feedback from Allan who 'phoned me
when Snoopy passed them at 2:08pm Saturday. The earlier sign had said "PLEASE DO NOT TOUCH ME (if I am sailing)".
The keel bulb arrived, along with three spare AS-17 servos, soon after I got back from Halfords, to buy a large
tin of fast-glass resin and hardener. The servo was the expected simple task, tightening the four screws and
sealing with silicon sealant, then screwing in and soldering the servo lead onto the terminals - not Futaba
sockets here ! There is now a larger warning sign, on the spare bit of deck space between solar panels and box.
It now says "PLEASE DO NOT TOUCH this boat if on water" after feedback from Allan who 'phoned me
when Snoopy passed them at 2:08pm Saturday. The earlier sign had said "PLEASE DO NOT TOUCH ME (if I am sailing)".
Fast Glass resin was poured into the f/g bulb, followed by lead shot, through a funnel. This was followed by more resin to cover the shot. I decided to put in more lead, above the bulb, bringing the weight to 3.7 kg. This means the plywood tongue must be shortened from 12cm to 8cm. That will be inserted into the bulb and surrounded by more shot and resin. The result should be the same planned depth of 30cm, but a bit heavier, giving more "righting moment". my estimate is that this will be more than the old keel - but I'll let you do the sums now: I'll just chuck it in and see how it sails :-)
The repair work will probably be finished tomorrow, including at least a couple of coats of paint. International Perfection, followed by Trilux anti-fouling paint. Unfortunately, the Bray Lake test may have to wait until at least Tuesday, because Snoopy's transport, fan belt and idler broke, just as I got back from Halfords. But my friend Gary will fix it :-)
Friday 12th September: checking keel fits into hull slot: bright sun hides fact wood needs carving, painting, etc. Pointy end other way round ? faster reversing ? nice weed catcher ? :-)
The picture above may raise a chuckle, but it raises an important point: imagine how much re-work, and time, would be needed, if I made this mistake, then only realised after the resin had set ! After this update, I intend to shape the wood of the new keel, blend the shape with materials like Fast-Glass and Isopon, then apply the first coat of paint - International Perfection.
 Here is some important information that surfaced, during recent discussion of an alternative launch spot, such as Boscombe.
I checked the software, unchanged since January 2013, and found that - if the boat drifts, or is launched, west of Boscombe Pier,
it is at great risk of switching to "Prawl" as it's destination, and so running aground on that coast towards Swanage.
When I say "software", don't get confused with other autopilot software programs that are used in our experimental boats.
This is the program, untouched since January 2013, that went through rigorous GPS Simulator tests, then years of Bray Lake testing,
and Atlantic Attempts in 2013 and 2014.
Here is some important information that surfaced, during recent discussion of an alternative launch spot, such as Boscombe.
I checked the software, unchanged since January 2013, and found that - if the boat drifts, or is launched, west of Boscombe Pier,
it is at great risk of switching to "Prawl" as it's destination, and so running aground on that coast towards Swanage.
When I say "software", don't get confused with other autopilot software programs that are used in our experimental boats.
This is the program, untouched since January 2013, that went through rigorous GPS Simulator tests, then years of Bray Lake testing,
and Atlantic Attempts in 2013 and 2014.
This software change is easy: simply change the number 1.85 to a bigger value, equivalent to a line through St Alban's Head. However, my whole system screamed out "no software change this year !", knowing how easy it is to make a mistake somewhere, or hit a major snag. But this software change would certainly make our choice of launch location far simpler, including use of the tide, when we don't get a good breeze to sail south. So I started to think about how to make the change, while paint dries on the repairs.
 Then I found a major snag: the autopilot picaxe is encapsulated with candle wax.
It seemed a good idea at the time, and probably still is, but loading new software is out of the question.
The autopilot is soldered into the wiring, and it would take a few days of effort to make a new one.
Then I found a major snag: the autopilot picaxe is encapsulated with candle wax.
It seemed a good idea at the time, and probably still is, but loading new software is out of the question.
The autopilot is soldered into the wiring, and it would take a few days of effort to make a new one.
 If anyone has the inclination, I'll be interested in
the wind speed and direction, from places like the Hurst Castle weather station, for the times at each of those SPOT
positions in the first few hours of sailing. I'd like to add these, with the tide speed and direction (that I have),
to see if we can understand better why Snoopy sailed direct towards his destination for two hours.
This will all help our planning of the next launch options, including location and time of launch.
You can click on the map, on the right, to see the bigger version.
If anyone has the inclination, I'll be interested in
the wind speed and direction, from places like the Hurst Castle weather station, for the times at each of those SPOT
positions in the first few hours of sailing. I'd like to add these, with the tide speed and direction (that I have),
to see if we can understand better why Snoopy sailed direct towards his destination for two hours.
This will all help our planning of the next launch options, including location and time of launch.
You can click on the map, on the right, to see the bigger version.
 Work went well on the new keel, with one minor snag: my surform was blunt: it, like me, is a bit old and worn - but the saw was
a practical alternative, even if not designed for that. After a coat of fast-glass resin had been applied, and was dry,
Isopon P38 "Easy Sand" filler was used to blend the shape. Luckily I saw my mistake in starting to blend in the tounge
that goes into the hull slot before the P38 had set: this stuff goes off in seconds !
Work went well on the new keel, with one minor snag: my surform was blunt: it, like me, is a bit old and worn - but the saw was
a practical alternative, even if not designed for that. After a coat of fast-glass resin had been applied, and was dry,
Isopon P38 "Easy Sand" filler was used to blend the shape. Luckily I saw my mistake in starting to blend in the tounge
that goes into the hull slot before the P38 had set: this stuff goes off in seconds !
 Then the important step: pouring Fast Glass resin into
the slot, and pushing the keel into place.
This went as I expected and hoped: a liberal ammount of fast-glass resin was poured into the slot, then the keel pushed in,
resulting in the resin rising up the sides and overflowing down the hull. Kitchen towel was used to mop this up as it happened.
The resin soon set, the top being within 10mm, seen through the larger hole at leading edge (left). It only remains to use
Isopon P40 to fill this hole and provide a strong fillet around where keel meets hull, before painting.
Then the important step: pouring Fast Glass resin into
the slot, and pushing the keel into place.
This went as I expected and hoped: a liberal ammount of fast-glass resin was poured into the slot, then the keel pushed in,
resulting in the resin rising up the sides and overflowing down the hull. Kitchen towel was used to mop this up as it happened.
The resin soon set, the top being within 10mm, seen through the larger hole at leading edge (left). It only remains to use
Isopon P40 to fill this hole and provide a strong fillet around where keel meets hull, before painting.
I won't tell you how many times I looked at my work, asking, "is that the right way round ?" :-)
 Earlier in the day I ordered two spare 5v batteries, since I will probably replace one in our duplicated 5v supply.
In recent months it always seems to show a lower voltage than the other: today 4.75v vs 5.12v. That will be a quick and easy job.
The 5v supply has coped so far, but we are approaching shorter days and even less sunshine for those solar panels.
The Isopon P40 sets as fast as the P38 ! Should soon be ready for it's first coat of paint.
Here are some details of the result: weight of the new keel before it was glued in was 4.25 kg, with the CofG just above the bulb,
24 cm from the hull. Total from hull to bottom of keel bulb is 31 cm, and the distance from the waterline will be about 40 cm
(about 16"). So, for the record, the boat now has a "draft" of 0.4 metre, compared with it's earlier 0.3m.
Earlier in the day I ordered two spare 5v batteries, since I will probably replace one in our duplicated 5v supply.
In recent months it always seems to show a lower voltage than the other: today 4.75v vs 5.12v. That will be a quick and easy job.
The 5v supply has coped so far, but we are approaching shorter days and even less sunshine for those solar panels.
The Isopon P40 sets as fast as the P38 ! Should soon be ready for it's first coat of paint.
Here are some details of the result: weight of the new keel before it was glued in was 4.25 kg, with the CofG just above the bulb,
24 cm from the hull. Total from hull to bottom of keel bulb is 31 cm, and the distance from the waterline will be about 40 cm
(about 16"). So, for the record, the boat now has a "draft" of 0.4 metre, compared with it's earlier 0.3m.

 The first coat of paint has dried, and will be given the extra coats, including Trilux anti-fouling paint,
while the boat has not got something more important to do - like it's first test sail with the new keel !
I'm looking forward to see how well the boat now sails, hopefully early next week, after my car is fixed :-)
The first coat of paint has dried, and will be given the extra coats, including Trilux anti-fouling paint,
while the boat has not got something more important to do - like it's first test sail with the new keel !
I'm looking forward to see how well the boat now sails, hopefully early next week, after my car is fixed :-)
After putting on the rig (mast and sails) the weight is 14.6 kg - that's 1.4 kg lighter than it was. June agrees we may be able to get it in the back of the open top car we have, if we decide to try it on Bray Lake this weekend ! :-)
Saturday 13th September: I've ordered three spare AXE024 Picaxe Servo Driver kits, used within the autopilot. If I am able to rebuild and test a replacement autopilot, with modified software, to avoid that "Heading to Prawl" problem above, in time, that will widen our launch opportunities enormously.
But, before making a modified version of the software, and building a replacement autopilot computer, we had better test how well our repaired "hardware" works. i.e. give the repaired boat 10 a test, with it's new keel, and see if major adjustments are needed, to things like the mast position, to achieve correct "sailing balance".
 Snoopy's normal transport, the rusty old Merc reg "C4 GPS", seen on many videos, will be "out of action" until at least
Tuesday. It's in the backround, in this picture on the left: click on it to see the bigger version.
I persuaded "long-suffering June" to do the driving, in our other car, while I, as passenger, ensured Snoopy was
comfortable. June's normal speed of 50 to 60 mph on country roads, would provide a good "hurricane test" for those sails.
Snoopy's normal transport, the rusty old Merc reg "C4 GPS", seen on many videos, will be "out of action" until at least
Tuesday. It's in the backround, in this picture on the left: click on it to see the bigger version.
I persuaded "long-suffering June" to do the driving, in our other car, while I, as passenger, ensured Snoopy was
comfortable. June's normal speed of 50 to 60 mph on country roads, would provide a good "hurricane test" for those sails.
 We got to Bray Lake safely, and Snoopy had a very successful Bray Lake Test - the first with his new keel.
You can see the details of the GPS plot on the right by clicking on the picture, to get the larger version.
The test went well, with the trip taking a little over 35 minutes, most of which was the "tacking" upwind,
and sometimes the wind was very light indeed. His turn at waypoint A was very quick, and we will see how well
the boat is balanced when it is tested in a stronger wind. i.e. if it suffers from "weather helm" or "lee helm"
(turning into wind or away from wind, in a strong sideways wind).
We got to Bray Lake safely, and Snoopy had a very successful Bray Lake Test - the first with his new keel.
You can see the details of the GPS plot on the right by clicking on the picture, to get the larger version.
The test went well, with the trip taking a little over 35 minutes, most of which was the "tacking" upwind,
and sometimes the wind was very light indeed. His turn at waypoint A was very quick, and we will see how well
the boat is balanced when it is tested in a stronger wind. i.e. if it suffers from "weather helm" or "lee helm"
(turning into wind or away from wind, in a strong sideways wind).
Play the Video of Testing Snoopy's Robot Boat Repairs - Snoopy's first Bray Lake Test with the new keel.
There was an interesting "close encounter" with a young lad on a surfboard - captured on the 7 minute youtube video :-)
The 5v battery with a low voltage of 4.75v was replaced by a spare, which had not been used for weeks, but was a healthy 5.28v. A second coat of International Perfection paint was applied, with the boat upside-down in our games room, so do not expect regular SPOT position reports tonight. June just LOVES the smell of that paint ! :-)
 Sunday 14th September: FAILURE OF THE MAIN ON/OFF SWITCH ! I am amazed how lucky we are in when failures happen.
e.g. the old keel falling off on my front lawn ! Now the main ON/OFF power switch has failed completely.
This is obviously a critical item in the system, and has it's own big section, "10. the Main 5v power ON/OFF switch."
in the
Design Page.
That was for an earlier boat. The blogs will probably show when this particular,
big, chunky double-pole, double-throw (DPDT), switch from Maplins was built into Boat 10 - probably when it had a "re-build"
early this year. The two sides of the switch are wired in parallel to give duplication.
It has obviously survived many months of almost continuous operation, in the "ON" state,
but not so many on/off operations. The picture on the left shows my confirming that the switch was faulty,
by shorting across with a pair of scissors - they DID switch on the autopilot.
There is probably no way we will ever know if an intermittent failure of this switch
caused, or contributed, to failure of the September Attempt. It is easy to fix, and I will replace it with exactly
the same product, and - if more important things have been dealt with - we will look at adding extra switches in parallel
- or even a "jumper lead" of some kind :-)
Sunday 14th September: FAILURE OF THE MAIN ON/OFF SWITCH ! I am amazed how lucky we are in when failures happen.
e.g. the old keel falling off on my front lawn ! Now the main ON/OFF power switch has failed completely.
This is obviously a critical item in the system, and has it's own big section, "10. the Main 5v power ON/OFF switch."
in the
Design Page.
That was for an earlier boat. The blogs will probably show when this particular,
big, chunky double-pole, double-throw (DPDT), switch from Maplins was built into Boat 10 - probably when it had a "re-build"
early this year. The two sides of the switch are wired in parallel to give duplication.
It has obviously survived many months of almost continuous operation, in the "ON" state,
but not so many on/off operations. The picture on the left shows my confirming that the switch was faulty,
by shorting across with a pair of scissors - they DID switch on the autopilot.
There is probably no way we will ever know if an intermittent failure of this switch
caused, or contributed, to failure of the September Attempt. It is easy to fix, and I will replace it with exactly
the same product, and - if more important things have been dealt with - we will look at adding extra switches in parallel
- or even a "jumper lead" of some kind :-)
 I have "some good news and some bad news" reguarding the software change related to "Prawl": the good news is that
the change was simple (just deletion of three lines of code) and it has been loaded into the spare (old) autopilot
that was in next year's Boat 11 - which now has it's own experimental, compass-based, autopilot.
The main bad news is no real surprise: that candle wax completely fills the software load socket,
so there is no way new software can be loaded. This was anticipated,
I expect to make up a replacement autopilot for Boat 10 with one of the Picaxe AXE024 kits already ordered.
I have a suitable GPS, so do not need to wait weeks for it to be delivered from Taiwan.
My instructions, including adding extra components, are in that design page above, in section
"8. the Autopilot sub-system, including GPS, PICAXE, and Rudder Servo".
I have "some good news and some bad news" reguarding the software change related to "Prawl": the good news is that
the change was simple (just deletion of three lines of code) and it has been loaded into the spare (old) autopilot
that was in next year's Boat 11 - which now has it's own experimental, compass-based, autopilot.
The main bad news is no real surprise: that candle wax completely fills the software load socket,
so there is no way new software can be loaded. This was anticipated,
I expect to make up a replacement autopilot for Boat 10 with one of the Picaxe AXE024 kits already ordered.
I have a suitable GPS, so do not need to wait weeks for it to be delivered from Taiwan.
My instructions, including adding extra components, are in that design page above, in section
"8. the Autopilot sub-system, including GPS, PICAXE, and Rudder Servo".
One concern I had, was which version of the software we have in the old autopilot now ? It is almost certainly AUTOP2TTS.BAS dated 28th January 2013, rather than a slightly different AUTOP3TTS.BAS, dated 23 January 2014 - which was probably only used for experiment. I cannot be 100% certain, relying on diary notes, before these detailed blogs started. The differences between the two programs was minor, relating to the timing of rudder delays. Today, I copied AUTOP2TTS to the new AUTOP4TTS, deleted the three lines of code, and this released a few bytes of the total 2KB of program memory: just enough to make a minor change, so we can tell what version is inside, if we plug in the TTS module. It now says "I am Snoopy's Autopilot" instead of "I am Snoopy". Memory has been so tight in that Picaxe, that even simple things like speaking the software version, or sending text to a connected PC, had to be commented out to give space. Those with doubts about this should checkout Snoopy's Software Page. Both this page, and that earlier "Design" page, have a section "11. the PICAXE Autopilot Software ..." which includes this picture, on the right, and a video of the GPS Simulator running. If you have not seen it, you may enjoy the end :-) This will probably be my next task, before wiring up that replacement autopilot: to make a "simulation script", similar to that you will see on the video, but also going back and forth past Boscombe Pier ! The new AUTOP4TTS program is already ready for this test.
Here is the faulty switch, stripped down. It is easy to see what a poor design this is: the two contact strips, simply touch onto the tags that come in to the back of the switch. No fancy silver contacts here ! Stripping down the switch took just a few minutes, but getting it out from the box MUCH longer. See that the toggle part is sawn off - that's the only way I could get it out - and that after removing the rear tags. The problem was that I had assembled the switch inside the box, in a central position, immediately behind the rudder post, then slid the box over the rudder post, before fixing it to the deck. The next, replacement switch(s), will be a bit to one side, and the original hole blocked.

 Monday 15th September: the solution was even simpler (see picture on left): I had a spare switch, the smaller version,
the same product as used in Boat 9/10 before it's rebuild with a better box. Two plastic "washers" were cut from
stiff plastic, and the lot bolded together, in the original central hole, with silicon sealant. The lemonade bottle top
was added in the usual way. That slightly corroded, rubber switch cover, was from the old switch, and will probably get
replaced soon, after another trip to Maplins.
Monday 15th September: the solution was even simpler (see picture on left): I had a spare switch, the smaller version,
the same product as used in Boat 9/10 before it's rebuild with a better box. Two plastic "washers" were cut from
stiff plastic, and the lot bolded together, in the original central hole, with silicon sealant. The lemonade bottle top
was added in the usual way. That slightly corroded, rubber switch cover, was from the old switch, and will probably get
replaced soon, after another trip to Maplins.
Now to look at the replacement of the Autopilot hardware, so it can include the new, modified software, to delay steering towards "Prawl" until west of 2W, and past Swanage....
 Progress on this is going well, so far. This old AXE024-based autopilot should avoid me
having to build this Picaxe board from scratch. It has already passed the "tea tray test", with it guiding me
up and down the road outside my house (see right). What is speaks confirms that it holds the latest AUTOP4TTS version
of the software. That GPS seems to work perfectly*, despite my earlier doubts, when we tested it in Boat 11
some weeks ago.
Most of those wires will go, when it is tidied up, ready to go into Boat 10's rear box.
* not surprising that it worked well - it was the later S4 version of the BR355 - I must order another,
for our experimental work on next year's electronics.
Progress on this is going well, so far. This old AXE024-based autopilot should avoid me
having to build this Picaxe board from scratch. It has already passed the "tea tray test", with it guiding me
up and down the road outside my house (see right). What is speaks confirms that it holds the latest AUTOP4TTS version
of the software. That GPS seems to work perfectly*, despite my earlier doubts, when we tested it in Boat 11
some weeks ago.
Most of those wires will go, when it is tidied up, ready to go into Boat 10's rear box.
* not surprising that it worked well - it was the later S4 version of the BR355 - I must order another,
for our experimental work on next year's electronics.
Now to see if I can get it to work with the GPS Simulator, to test the software near Boscombe Pier ! After a bit of "finger trouble" remembering how to use the simulator, I got it working, and soon made a "Prawle" simulation script, to test the software when the boat goes past Bournemouth. i.e. it should continue steering to the "Channel" waypoint, and not switch to "Prawle". I managed to find yet another spare Picaxe board, in my boxes of bits, so this one can be used as a "software test bed", on the simulator, while I tidy up the other board, and fit it into the boat, to replace the one sealed in candle wax, preventing a software change. Plenty of time to decide if this board gets surrounded in wax too: I don't think it will ! :-)
 Great News ! We now have autopilot loaded with the modified software, so it should NOT steer towards the east-facing shore,
if the boat gets near Bournemouth ! What's more, this is in the existing autopilot, and I did not need to make a new one.
Great News ! We now have autopilot loaded with the modified software, so it should NOT steer towards the east-facing shore,
if the boat gets near Bournemouth ! What's more, this is in the existing autopilot, and I did not need to make a new one.
After getting to the stage where I had several options to provide a replacement of the autopilot, I decided to "live dangerously", and "drill out" the wax from the program load socket. I used a small screw driver and a smaller drill. I soon managed to push the jack into the socket, and hoped all the contacts and switches worked: they did ! Imagine my joy when I saw it loading, on the laptop display, and even greater joy when I switch on the boat, with a text-to-speech box plugged in, and the software announces, "I am Snoopy's Autopilot". i.e. the modified version loaded. When left running, it says the right things, such as the direction to Bray Lake waypoint A, and twitches the rudder, as it should.
The boat has now been left running for some 24/7 testing, sat in a sunny spot on our back patio.
 While we take holidays, we can give some thought to our plans for the next attempt,
from various alternative launch spots, and times to exploit the tide. If we can predict the behaviour of Snoopy's boat,
for particular wind speed and direction, and the changing tidal current speed and direction, we are more likely to
avoid mishaps like landing on the Isle of Wight !
While we take holidays, we can give some thought to our plans for the next attempt,
from various alternative launch spots, and times to exploit the tide. If we can predict the behaviour of Snoopy's boat,
for particular wind speed and direction, and the changing tidal current speed and direction, we are more likely to
avoid mishaps like landing on the Isle of Wight !
On the right is a picture which tries to explain some of the things we have learnt in recent years. e.g. a bottle, just drifting on the surface, will move at about 3% of the wind speed, downwind, and will also move with the tide. So if the wind is from the north, and the tide is flowing west, the bottle will move to the West-South-West, in a direction that varies with the tide. The bottle will progress south at 0.3 mph (3%), regardless of what extra velocity the tide gives it.
Next year, our electronics may include a compass-based autopilot, but many months of work are needed before this becomes reliable enough, rather than one of the experimental prototypes, with which we have been playing, on the compass page. The advantage of a compass-steered boat, in this situation, is that it can simply point south, and make it's sailing speed, of perhaps 1.5 mph (15% downwind), even though the tide will carry it even further in the east-west-east direction. Therefore, a compass steered boat will need even more condideration of strong tide than our current and past GPS-only systems.
The third example here is for our GPS-only steered boats. We are still quantifying at what combination of tide speed and wind speed, the "tide wins". Sailing speed, for our boats, seem to be about 15% of wind speed, when sailing downwind, and nearer 10% when sailing cross wind.
For a coast-to-coast attempt like ours, the tide must be taken into consideration, since currents tend to be much stronger near the coast. Of course, landing at the other end will be at an unknown date and time, so tide cannot be predicted, as it can for the launch. But I suppose it can be measured, by a suitable manouvre like "circling" for a while. However, I don't think we will worry about what happens near the USA just yet :-)
Tuesday 16th September:
Thanks to Chris in Canada, we now have the detailed plot recorded by Snoopy's I-GotU GPS logger: every 12 minutes. More here soon. Thanks Chris !
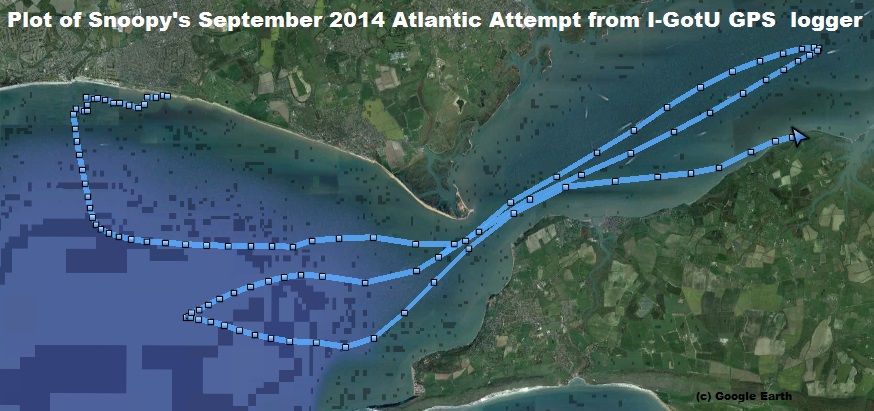
The above plot is now on the more prominent "September Attempt" page, and I've added this link to a Google Earth KML file:
"You can see the
I-GotU plot in Google Earth extracted with Notepad from what is now on Microsat Tracking Page above.
It should be clearer, with less labels".
Snoopy has been on 24/7 test at home for more than a day, and I checked his main 5v power which looked OK: (5.15,5.35->5.14v @1415 Monday) then (4.86,4.83->4.59 @0830 Tuesday, dull but brighter later). He is still running - around the garden :-).
 Wednesday 17th September: An early start today, but tonight it's early to bed and up early tomorrow, to fly off on
holiday to Sicily. Back in two weeks, but I've set up a webcam, pointing at Snoopy
in our back garden, so I can see how he's doing during the first two weeks of 24/7 test - even if not on water.
Click on the picture on right, to see the bigger version, just seen here. Peter and Dick will know the
account and password, if they have got my recent emails - I know Peter has. Yes Dick, I know yours are
bouncing, being in deepest Scotland, but I know you will look here sooner or later. I hope you and Liz
remembered your passports, 'cos we may not let you back in after tomorrow (that stupid referendum).
After following the link below, you should choose the option that is "Mobile Phone (For Browser that supports Javascript)"
to get the screen like this. It works on my Windows 7 PC and June's Kindle and smartphone.
You should be able to see the rudder twitching, every few seconds, which says the autopilot is still running.
i.e. the batteries have not gone flat after too many days without sun. If that happens, it should start again when the sun comes out.
You will see if the navigation light goes out, before dawn, for similar reasons. You may even make out the flashing
of I-Gotu GPS logger, and SPOT Messenger, including the longer flash when SPOT begins it's hourly transmission.
You can steer the camera, but won't see much else, because of the curtain behind it. I hope it does not fall off the
cardboard box ! I got several of these �30 "Starcam", years ago, for things like watching wildlife in our garden, and they are good value.
The (corrected) link to Snoopy's webcam is
here (NOW SWITCHED OFF).
Wednesday 17th September: An early start today, but tonight it's early to bed and up early tomorrow, to fly off on
holiday to Sicily. Back in two weeks, but I've set up a webcam, pointing at Snoopy
in our back garden, so I can see how he's doing during the first two weeks of 24/7 test - even if not on water.
Click on the picture on right, to see the bigger version, just seen here. Peter and Dick will know the
account and password, if they have got my recent emails - I know Peter has. Yes Dick, I know yours are
bouncing, being in deepest Scotland, but I know you will look here sooner or later. I hope you and Liz
remembered your passports, 'cos we may not let you back in after tomorrow (that stupid referendum).
After following the link below, you should choose the option that is "Mobile Phone (For Browser that supports Javascript)"
to get the screen like this. It works on my Windows 7 PC and June's Kindle and smartphone.
You should be able to see the rudder twitching, every few seconds, which says the autopilot is still running.
i.e. the batteries have not gone flat after too many days without sun. If that happens, it should start again when the sun comes out.
You will see if the navigation light goes out, before dawn, for similar reasons. You may even make out the flashing
of I-Gotu GPS logger, and SPOT Messenger, including the longer flash when SPOT begins it's hourly transmission.
You can steer the camera, but won't see much else, because of the curtain behind it. I hope it does not fall off the
cardboard box ! I got several of these �30 "Starcam", years ago, for things like watching wildlife in our garden, and they are good value.
The (corrected) link to Snoopy's webcam is
here (NOW SWITCHED OFF).
So now it's two weeks holiday in Sicily, before we get back, and "work" can continue on Snoopy's next Atlantic Attempt.
 Sunday 21st September: from Sicily: here is the picture that I said was on this "blog" page: it is now
- not just on our "Sicily in 2014" page :-)
Sunday 21st September: from Sicily: here is the picture that I said was on this "blog" page: it is now
- not just on our "Sicily in 2014" page :-)
I have an email from SPOT to say their system is down for maintenance for a short time on Thursday. If Snoopy's SPOT transmissions stop, that may be why.
I've uploaded a new page about some things "completely different": my Grumpy old man page. It's now also linked from my "family" page.
Wednesday 24th September: Sam, at home, switches Snoopy off and on, to restart autopilot. Webcam now shows OK.
Friday 26th September: No rudder movement: something to be fixed - but it can wait until we are home :-)
... meanwhile, we force ourselves to enjoy this year's holiday in Sicily :-)
Friday 3rd October: we are home - what a Great Break ! :-) Both Snoopy's main 5v batteries
had dropped to ~ 2v. Too shady a spot in garden, combined with shorter days ?
will be investigated... confirmed: solar panels not getting sun - recharged
(5.43,5.45->5.22v) and autopilot switched on at 1725, to see if it maintains enough
power, in a sunnier spot in the garden. The webcam is now off.
Saturday 4th October: Autopilot switched off at 1710: flat 5v (2.99,2.99->2.75v) rainy day; some sun at end.
 Sunday 5th October : LHS solar panel failure ? So only 50% 5v power - not good with shorter days + leaves on trees ! Recharging.
Will check + repair LHS. More later....
Sunday 5th October : LHS solar panel failure ? So only 50% 5v power - not good with shorter days + leaves on trees ! Recharging.
Will check + repair LHS. More later....
After tests, I had to remove both panel assemblies - revealing faults on both, due to water corrosion, breaking wires
and diodes, under the panels. Not surprising, considering how many months (or years?) these panels have
been in use on boat 9 then 10. I have repaired one panel, including changing two diodes, but am rebuilding
the second panel, using 4 spare 130x130mm 6v cells. This is because corrosion seems to have got into
the cells themselves. e.g. through plated holes ? Yes, if you read the blogs, you will see that I use
resin, varnish and sealant, to protect the cells. But I will need to do an even better job this time ! :-)
Tuesday 7th October : Both repaired panels on boat, back on 24/7 in garden at 1115am. After some sun, both sides near 5.6v at 1430.
Snoopy ready for a "weather window" ?
Thursday 9th October: Main 5v power holding up well, despite spot on patio, under CCTV, not much sun (4.94,4.91->4.66v @9am). Need to watch solar lamp (only on 2 hours?).
 Friday 10th October: Useful tests on the patio, which does not receive direct sunlight until late morning,
confirm that the autopilot restarts OK after a power failure. CCTV recording is useful in showing when the autopilot
stops and restarts; also when the solar powered navigation light goes out. e.g. last night, the lamp went out at
about midnight ( ~ 5 hours), and the autopilot stopped at about 0415 ( < 3 days in little sun ).
Main power at 0745: (2.8,2.8->2.6v) and at 0900: (2.95,2.92->2.68v).
However, by 10am, long before low sun reached the solar panels, the autopilot was running again ( 4.9,4.9->4.7v).
The navigation light is powered by a single AAA rechargeable NiMHd cell, and is slowly charging after
several days indoors. A spare "ultra" lamp is within sight of the CCTV, in case we need to swap.
See lamp testing in February, on
Blog2 for which is the "ultra" product.
We will
continue to monitor.
Friday 10th October: Useful tests on the patio, which does not receive direct sunlight until late morning,
confirm that the autopilot restarts OK after a power failure. CCTV recording is useful in showing when the autopilot
stops and restarts; also when the solar powered navigation light goes out. e.g. last night, the lamp went out at
about midnight ( ~ 5 hours), and the autopilot stopped at about 0415 ( < 3 days in little sun ).
Main power at 0745: (2.8,2.8->2.6v) and at 0900: (2.95,2.92->2.68v).
However, by 10am, long before low sun reached the solar panels, the autopilot was running again ( 4.9,4.9->4.7v).
The navigation light is powered by a single AAA rechargeable NiMHd cell, and is slowly charging after
several days indoors. A spare "ultra" lamp is within sight of the CCTV, in case we need to swap.
See lamp testing in February, on
Blog2 for which is the "ultra" product.
We will
continue to monitor.
Monday 13th October: Snoopy's trolley has been modified, to raise the two handles, and straighten
the two wheels - note Dick's problems pushing it in our
Video of the September 2014 Attempt.
The autopilot was switched off at 10am, to give the solar panels a chance to charge the 5v batteries,
going flat, after several days of cloudy conditions. Yesterday (Sunday) morning, the autopilot did
not stop until 4am in the morning, but was running again by midday, in weak sunshine.
That did not last long, and by 4pm it had stopped again.
 Saturday 18th October: The autopilot was switched on again, at 1pm yesterday, and the following details
confirm how the autopilot behaves in marginal conditions, such as shorther days and a shady garden.
CCTV showed the autopilot running until 0615, when the rudder stayed central. As power dropped further,
the servo moved to full right rudder by 0645. As it became light, the solar power began to recover,
and by 0800 the rudder was centred. By 0900 the autopilot was running again, despite the sky
being overcast. 5v power was then checked: 4.7,4.7->4.5v. The autopilot was left on, but
no sun is expected, so we expect it to stop within daylight hours. We can live with these
limitations.
Saturday 18th October: The autopilot was switched on again, at 1pm yesterday, and the following details
confirm how the autopilot behaves in marginal conditions, such as shorther days and a shady garden.
CCTV showed the autopilot running until 0615, when the rudder stayed central. As power dropped further,
the servo moved to full right rudder by 0645. As it became light, the solar power began to recover,
and by 0800 the rudder was centred. By 0900 the autopilot was running again, despite the sky
being overcast. 5v power was then checked: 4.7,4.7->4.5v. The autopilot was left on, but
no sun is expected, so we expect it to stop within daylight hours. We can live with these
limitations.
Tuesday 21st October: it did stop - at 4pm, so autopilot was switched off last Saturday,
to ensure Snoopy's 5v power would be ready, when needed. The I-GotU GPS logger was re-charged,
it's data downloaded, and the I-GotU restarted.
27th October 2014: Snoopy did the Bray Lake Test well - the first after the minor software change
to the autopilot, related to Prawle point, and new ability to launch near Boscombe or Sandbanks.
i.e. AUTOP4TTS.BAS 14Sep14. This was to give us confidence the software was still working!
The boat did well, completing within about 25 minutes. Weight of boat is now 15.25 kg.
Click on the GPS plot on the left to see the bigger version.
Thursday 30th October: lamp was swapped for identical �2.50 spare, which CCTV showed staying on longer: 7 hours,
in shady garden. Videos from 1998 Whitbread round-the-World yacht race, added to our very old
GPSS on Water page.
We now have a new "experimental blog" in BlogX to hold information about our background experimental work, which may find it's way into future boats. e.g. a compass in boat 11 for 2015. We "play" with the experimental stuff, while we wait again for a "launch window", for this year's next Atlantic attempt. This will probably be from Boscombe, or Sandbanks, rather than Barton. We need an off shore breeze and FLAT surf conditions. For this we watch Magic Seaweed.
Friday 21st November:
Snoopy may make an Atlantic Attempt early Sunday 23rd. Tomorrow, we may move
him from back garden, to see if his Spot map works inside the car.
 Saturday 22nd November:
Snoopy is ready for tomorrows attempt at 0830. I JUST managed to squeeze Snoopy into the back
of our slightly less rusty CX180, which is certainly smaller than the old E240 you will see
on the videos. The rig of mast and sails is easily detached and put back on. Spot3 position reports
still come through, with this position in the car. Before putting Snoopy Sloop 10 into the car,
a number of things were checked: Main 5v power was good and high ( 5.2, 5.24 -> 5.03v )
- as expected, because not left on 24/7 in recent days. The I-GotU GPS logger had it's data
downloaded, memory cleared, and was checked to be set to record positions every 12 minutes,
circular logging, in power saving mode. It was also re-charged. More grease was put around
top of servo and it's linkages. The Maplin AAA NiMH cell in the lamp was low, at 0.94v,
so this was swapped for a full one at 1.31v - at least it should stay on all of the first night !
The total boat weighs exactly 16 kg.
Everybody seems ready for tomorrow morning, including Dick, Peter, Mark, myself,
and long-suffering June :-)
For details, such as launch location, near Boscombe Pier, see
Snoopy's Front Page.
There is also a link to the SPOT map, so you can see us leaving home:
it should take about 1.5 hours from Sunninghill to the Boscombe launch location.
The SPOT map has now been set up to hold 7 days, instead of 24 hours, of positions.
I've surpressed older ones, and later tomorrow, expect to suppress those earlier
than the launch time - so the map is clearer, showing only the plots out to sea.
Pity about the rain expected !
Saturday 22nd November:
Snoopy is ready for tomorrows attempt at 0830. I JUST managed to squeeze Snoopy into the back
of our slightly less rusty CX180, which is certainly smaller than the old E240 you will see
on the videos. The rig of mast and sails is easily detached and put back on. Spot3 position reports
still come through, with this position in the car. Before putting Snoopy Sloop 10 into the car,
a number of things were checked: Main 5v power was good and high ( 5.2, 5.24 -> 5.03v )
- as expected, because not left on 24/7 in recent days. The I-GotU GPS logger had it's data
downloaded, memory cleared, and was checked to be set to record positions every 12 minutes,
circular logging, in power saving mode. It was also re-charged. More grease was put around
top of servo and it's linkages. The Maplin AAA NiMH cell in the lamp was low, at 0.94v,
so this was swapped for a full one at 1.31v - at least it should stay on all of the first night !
The total boat weighs exactly 16 kg.
Everybody seems ready for tomorrow morning, including Dick, Peter, Mark, myself,
and long-suffering June :-)
For details, such as launch location, near Boscombe Pier, see
Snoopy's Front Page.
There is also a link to the SPOT map, so you can see us leaving home:
it should take about 1.5 hours from Sunninghill to the Boscombe launch location.
The SPOT map has now been set up to hold 7 days, instead of 24 hours, of positions.
I've surpressed older ones, and later tomorrow, expect to suppress those earlier
than the launch time - so the map is clearer, showing only the plots out to sea.
Pity about the rain expected !
Sunday 23rd November: Snoopy's attempt at 0830 was aborted, probably due to a software bug. See Snoopy's November 2014 Attempt to see what happened.

 Here is more detail on work to confirm the software bug, then fix it, then confirm it is fixed.
This should be done with the GPS simulator. SEE MY WORDS ABOVE, on 12th September, written after I made
the software change, then on the 14th ! Testing the change with the GPS Simulator,
was certainly on my "list of things to do", but this blog shows that I forgot to do it !
I hope to do that tomorrow, or soon after. Today, I looked carefully at the autopilot
program AUTOP4TTS.BAS and saw a change that I missed: a number that needs changing.
It seems the result is that, when near Eastbourne, the boat will steer, not to "Prawle Point",
but towards the (old) "Microtransat Start" position. This is in exactly the direction
Snoopy sailed today, parallel to the shore. I've just checked the software on this PC,
and it seems I did get as far as making a suitable "Prawle" simulation script,
but not as far as testing the modified software, in the autopilot Picaxe, with the simulator.
Progress with the simulator,
and another software change, will be reported here.
Here is more detail on work to confirm the software bug, then fix it, then confirm it is fixed.
This should be done with the GPS simulator. SEE MY WORDS ABOVE, on 12th September, written after I made
the software change, then on the 14th ! Testing the change with the GPS Simulator,
was certainly on my "list of things to do", but this blog shows that I forgot to do it !
I hope to do that tomorrow, or soon after. Today, I looked carefully at the autopilot
program AUTOP4TTS.BAS and saw a change that I missed: a number that needs changing.
It seems the result is that, when near Eastbourne, the boat will steer, not to "Prawle Point",
but towards the (old) "Microtransat Start" position. This is in exactly the direction
Snoopy sailed today, parallel to the shore. I've just checked the software on this PC,
and it seems I did get as far as making a suitable "Prawle" simulation script,
but not as far as testing the modified software, in the autopilot Picaxe, with the simulator.
Progress with the simulator,
and another software change, will be reported here.
Monday 24th November:
This picture and words were put up this morning:
"Maybe it's a good job we did not know we could have launched Snoopy from a few yards east: he may have made it
- or we might not have got him back ! :-) "
I hit a snag with the GPS Simulator: more of that in a moment. I then looked closer at the bug
in our modified Picaxe software AUTOP4TTS dated 14th September 2014, which resulted in the picture above.
I modified the offending line of code, in a new program: AUTOP5TTS dated 24th November.
On startup, it speaks "I am Snoopy's autopilot five". (some old boys may remember "Oil giv it foiv"
from Juke Box Jury). This version is now loaded into Boat 10's Picaxe autopilot, and also our spare
autopilot, for use with the GPS Simulator. My XP laptop was used to load AUTOP5TTS - see below.
 Now that snag with the simulator: I've got strange symptoms with the simulator running on this Windows 7 desktop,
that has been used in the past: the autopilot is plugged into the COM1 serial port on the PC, instead of the
serial BR355 GPS. Instead of responding to simulated GPS data, from the PC, it is effected by movement of my USB mouse !
The program seems to restart, when I move the mouse ! It's possible the mouse, and it's driver software, were changed,
since I last used the simulator. Unplugging the mouse stops the interference, but no simulated data is received.
Sadly, my XP Laptop does not have an old 9-pin D serial port, or I might have tried that as a work-around.
I'm hoping it is something simple, like configuration of the simulator. We could use the boat now, but I'd feel more
comfortable if the latest software has been tested with the simulator, as was our original version from two years ago,
when we were not planning to go near Bournemouth.
Now that snag with the simulator: I've got strange symptoms with the simulator running on this Windows 7 desktop,
that has been used in the past: the autopilot is plugged into the COM1 serial port on the PC, instead of the
serial BR355 GPS. Instead of responding to simulated GPS data, from the PC, it is effected by movement of my USB mouse !
The program seems to restart, when I move the mouse ! It's possible the mouse, and it's driver software, were changed,
since I last used the simulator. Unplugging the mouse stops the interference, but no simulated data is received.
Sadly, my XP Laptop does not have an old 9-pin D serial port, or I might have tried that as a work-around.
I'm hoping it is something simple, like configuration of the simulator. We could use the boat now, but I'd feel more
comfortable if the latest software has been tested with the simulator, as was our original version from two years ago,
when we were not planning to go near Bournemouth.
I-GotU GPS logger was empty: Did I forgot to switch it on ? Tested it with a local trip: OK. Recharged on PC, to be sure.
Switched on, and back in boat, blue light flashing OK.
Tuesday 25th November:
GPS Simulator still not working on this Win7 PC. The GPS simulation video above was uploaded on 31 January 2013,
and this was running on this PC. I thought it could be the cable, PC COM1 9-way D --> 6-pin DIN, that I remember
making up, but cannot find. My desk diary of 2012, shows this made on 1st August 2012, with just two wires, 0v and signal
- the signal being orange. I just cut wires on the cable used, but get same behaviour as yesterday.
This seems to be a strange Microsoft software problem, like interference between USB mouse and COM1 port,
maybe due to a driver update. I'll try and find a work-around, such as use of a different PC. e.g. XP.
 1715 update: THE GPS SIMULATOR IS WORKING ! First on my XP Laptop: the autopilot seems to work as it should,
always steering towards "Channel" waypoint, including when near Bournemouth. see left. Solution was to buy a USB Serial
Converter from Maplins. This also works on the Win7 desktop PC, which is more convenient.
I don't need to solve Microsoft problems - someone else can do that :-)
More thorough tests will be done tomorrow. e.g. reproducing last Sunday's problem with earlier software version.
It looks as if we may have a Weather window next weekend :-)
1715 update: THE GPS SIMULATOR IS WORKING ! First on my XP Laptop: the autopilot seems to work as it should,
always steering towards "Channel" waypoint, including when near Bournemouth. see left. Solution was to buy a USB Serial
Converter from Maplins. This also works on the Win7 desktop PC, which is more convenient.
I don't need to solve Microsoft problems - someone else can do that :-)
More thorough tests will be done tomorrow. e.g. reproducing last Sunday's problem with earlier software version.
It looks as if we may have a Weather window next weekend :-)
Wednesday 26th November:
The GPS simulator recreated the fault seen last Sunday, and confirmed the software bug had been removed. See above.
The GPS simulation was then run, to test the latest autopilot software, AUTOP5TTS, across the Atlantic, to Snoopy's final
destination in USA: see below.
The above final destination will be familiar to those who watched the end of the GPS Simulation video. uploaded in January 2013, nearly two years ago :-)
 Saturday 29th November:
Snoopy is ready for tomorrow's attempt. Main power is good ( 5.2, 5.19 -> 4.92v ), I-GotU GPS Logger is recording
- checked by downloading last week of data - and it was put on charge, just to be sure, then put back in the boat, an hour later
- after making sure it was switched ON !
The SPOT Management was used to change the SPOT3 page to hold 2 days of plots, instead of 7. This was to
get around a SPOT system problem of a rogue report at 0840 on 27th, that could not be suppressed.
This means, that when we get home, I can suppress all positions prior to the launch - so the map zooms
in on the sea area, and shows up to 2 days of history. We can switch to 7 days later, if we wish.
Snoopy was moved from the back garden, into the car, on our front drive, just after his 1645 SPOT position report.
The picture on the right, and words about Robin's "best guess" for tomorrow, were added to
Snoopy's Front Page. We will see what tomorrow brings ! :-)
Saturday 29th November:
Snoopy is ready for tomorrow's attempt. Main power is good ( 5.2, 5.19 -> 4.92v ), I-GotU GPS Logger is recording
- checked by downloading last week of data - and it was put on charge, just to be sure, then put back in the boat, an hour later
- after making sure it was switched ON !
The SPOT Management was used to change the SPOT3 page to hold 2 days of plots, instead of 7. This was to
get around a SPOT system problem of a rogue report at 0840 on 27th, that could not be suppressed.
This means, that when we get home, I can suppress all positions prior to the launch - so the map zooms
in on the sea area, and shows up to 2 days of history. We can switch to 7 days later, if we wish.
Snoopy was moved from the back garden, into the car, on our front drive, just after his 1645 SPOT position report.
The picture on the right, and words about Robin's "best guess" for tomorrow, were added to
Snoopy's Front Page. We will see what tomorrow brings ! :-)

See the "current" Blog from the Good November 2014 Attempt, until now: preparing Boat10 for the 2015 attempt.
© 1991-2014 Robin Lovelock. Please credit www.gpss.co.uk if you use material from any of these pages. Thankyou.