
Home . GPS . Download . Business . Partners . Contact . Family . AVL . Links . History . AsOnTV .
Home . GPS . Download . Business . Partners . Contact . Family . AVL . Links . History . AsOnTV .

 This page describes GPSS use for Radio Direction Finding - the location
of a radio transmitter by "hunting it down", with a suitable
radio receiver and antenna.
This page describes GPSS use for Radio Direction Finding - the location
of a radio transmitter by "hunting it down", with a suitable
radio receiver and antenna.
One of the first uses of GPSS in this way was by Gary Morris, a Falconer in UK who wanted to find his birds when they got lost. He simply typed the bearings into GPSS on the Laptop keyboard, read off a compass mounted to his hand-held directional receiver. You can see the small transmitter with wire antenna in the picture from the TV programme on the low left. More of this on the Falconry and As On TV pages.
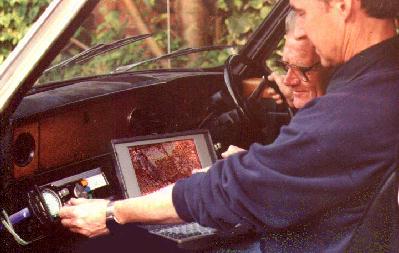
In more recent years, better systems appeared, initially in the USA,
 where the direction of the receiver antenna, relative to the car heading,
was sent automatically, with data from the GPS, into GPSS - which could then
do all the required processing, display and voice guidance automatically.
Joe Tomasino
on Long Island, USA, was one of the first to test GPSS with automatic DF hardware.
where the direction of the receiver antenna, relative to the car heading,
was sent automatically, with data from the GPS, into GPSS - which could then
do all the required processing, display and voice guidance automatically.
Joe Tomasino
on Long Island, USA, was one of the first to test GPSS with automatic DF hardware.
 Pioneering hardware such as the Agrelo DFjr, AhHa MicroFinder, or similar
"home built" solutions in Europe,
seem to be in the category of "cottage
industry" and tend to be only used by those with the right technical know-how.
Mind you - some of these "home-built" solutions can be both advanced, and
to a good built quality - such as the Control Unit on the right, built and
used by Dave Bullock in UK.
Pioneering hardware such as the Agrelo DFjr, AhHa MicroFinder, or similar
"home built" solutions in Europe,
seem to be in the category of "cottage
industry" and tend to be only used by those with the right technical know-how.
Mind you - some of these "home-built" solutions can be both advanced, and
to a good built quality - such as the Control Unit on the right, built and
used by Dave Bullock in UK.
Dave appeared on UK TV (Foxhunting pictures below), and his antenna
is certainly not sophisticated. i.e. it mechnically rotates,
instead of electronically calculating the bearing from a fixed
array. However it works well enough to win competitions :-)
 Hopefully this "cottage industry situation" will change,
and products appear that can be supplied for reliable use
by the non-technical end user. e.g. the rich arab, tracking his falcons, or
police, tracking a small parcel containing drugs.
Hopefully this "cottage industry situation" will change,
and products appear that can be supplied for reliable use
by the non-technical end user. e.g. the rich arab, tracking his falcons, or
police, tracking a small parcel containing drugs.
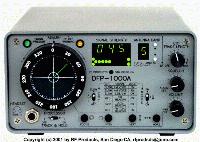
One example of "professional" hardware (and therefore too expensive for the amateur radio enthusiast) is the DFP1000A pictured on the right, manufactured by RF Products who have a website on www.rdfproducts.com The DFP1000A is used with GPSS, but the required interface software is only available to "business" users of GPSS. Those interested in discussing business with me should visit my business page. When I see, or hear of, other solutions of GPS-DF-GPSS working well, I will be glad to give them exposure on these pages, to help others promote and/or sell it.
Meanwhile, most of my contacts on this subject are radio amateurs, or "hams" - who will probably also want to visit our RADIO Page.
During 2000 and 2001 things went "full circle", with some good
work being done by members of a "DF Foxhunting Club" in Nottingham, UK.
People like Dave Bullock and Martin Dale began winning quite a few competitions
using GPSS. Please see the "Foxhunting"
section below for some pictures from Nottingham, UK. Much of this DF page was
created before 2000, but I try to keep it up to date.
Most of the information on this page goes back many years - but a more recent development is the introduction of GPSS DF capability on the Pocket PC. For details, see DF on Pocket PC.
Robin Lovelock
February 2007, Sunninghill,UK.
This was the first piece of DF hardware known to Robin, capable of being used with a GPS and the automatic DF facilities in GPSS. Agrelo Engineering advertised their DFjr on www.swssec.com/agrelo.html but I do not think this now exists. I understand Agrelo Engineering ceased trading in 1998, and the DFjR product was aquired by Steve Uhrig/SWS Security, who no longer sell it at low cost into the radio amateur community. However, since then, a number of others have implemented the %090/8 format.
Another source of DF hardware with the same capability to accept GPS and %123/8 format DF data into GPSS, is that from Mike Allison, AhHa Systems, 4429 Guilford Place, Livermore Ca, USA. For details visit www.ahha-doppler.com
Here is where you can get the "Montreal Doppler 3 by Jacques VE2EMM" : ve2ums.ca/chasse/equipement/ (this added in July 2005).
Here is where you can get the PicoDopp DF from Santa Barbara, CA :
here
(this added in July 2005).
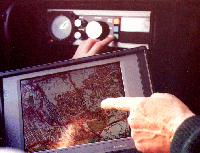
GPSS can be used to triangulate the position of a
radio transmitter from bearings.
You should probably best start by running the GPSS Baseline,
watching the normal in-car demonstration which appears
if no GPS is detected. Wait for the DF demo towards the end.
You can then test DF logic "on the desk" by using Control-C STOPDEMO to
switch off any demonstration,
and clicking with the right mouse button
to move the simulated car position. The heading of the car
will be updated, according to direction you move it.
You can then enter a DF bearing by typing:
`090
followed by the Enter key. This should draw a DF line at bearing 090
(90 degrees clockwise from straight ahead). If you then click with
right mouse button again, moving the car further north, then enter
`120 - it should add a second DF line that cuts the first, and
trangulate the position. If you hit the W key, it should give
voice guidance to this triangulated position.
This is entering absolute bearings - as read from a compass.
You can switch the GPSS logic to enter relative bearings
by entering:
`dfbrgrel
followed by Enter key as a command. This toggles between
absolute and relative to car heading.
Other special commands are provided by bearings greater than 360:
`400 to `499 - triangulation distance threshold 0 to 9.9 km. Now first line in GPSSDF.CFG below.
`999 - clears all the bearings.
`888 - switches on "initial bearing" option (first bearing used for all triangulations).
With an automatic interface, supplying GPS data and the DF bearings in a format such as %090/8 into a Laptop PC COM1 port, all this can be done automatically. The automatic bearings are assumed by GPSS to be relative to car heading.
Many of the facilities are common to all GPSS applications. e.g. map display and verbal description of where a place is: "25 miles west of London and 2.5 miles south of Ascot".
GPSS displays the bearing lines on the map, radiating from the current car position. GPSS calculates the intersection of the last two bearings entered, and moves the destination to that location. The location is described verbally, relative to the nearest towns. Voice guidance is then provided to the destination, with other information such as Expected Time of Arrival.

|

|
 |
 Over the years, many of the "DF enthusiasts" who have contacted Robin
speak about participation in "Fox-Hunting" competitions. He is now
getting a better idea of what these events, held in many countries,
are all df1.
Over the years, many of the "DF enthusiasts" who have contacted Robin
speak about participation in "Fox-Hunting" competitions. He is now
getting a better idea of what these events, held in many countries,
are all df1.
They seem to be groups of "radio hams" who see which team can find the "fox" - a hidden radio transmitter - the fastest, driving around in their car with a DF system.
But best to just repeat some words recently sent from Martin Dale, a member of the UK-based ARCON club. Most of the recent ARCON Fox-Hunts have been won by Dave Bullock using GPSS - and what sounds like a neat combination of hardware and skill.
 Dave has been in regular contact with Robin for some time now,
as have many other "DF enthusiasts" around Europe and USA.
He obviously has a few "tricks hidden away", one of which
was GPSS - but it only seems that within ARCON this was a "secret" :-)
Here is John Wood, G0PSI (left) and Dave Bullock, G6UWO holding the trophy :-)
Dave has been in regular contact with Robin for some time now,
as have many other "DF enthusiasts" around Europe and USA.
He obviously has a few "tricks hidden away", one of which
was GPSS - but it only seems that within ARCON this was a "secret" :-)
Here is John Wood, G0PSI (left) and Dave Bullock, G6UWO holding the trophy :-)
I understand that Martin Dale and his partner, Mike Mansfield, won the last event, using GPSS, after a long run of wins by Dave & John.
Here are Martin's words from a recent e-mail to Robin, with more pictures based on some e-mailed from Dave:
 The Amateur Radio Club of Nottingham (ARCON) meet every Thursday at the
Haywood Community Centre, Haywood Rd. Mapperley, Nottingham.
Full membership costs �30/year
Foxhunt only members �1 per foxhunt.
The Amateur Radio Club of Nottingham (ARCON) meet every Thursday at the
Haywood Community Centre, Haywood Rd. Mapperley, Nottingham.
Full membership costs �30/year
Foxhunt only members �1 per foxhunt.
ARCON organises 7 foxhunts throughout the year on the 3rd Thurs of each
month starting in April, and finishing in October.
The teams score on shortest time to find the fox
1st place gets 30 points (usually Dave and John!)
2nd 25pts then,
3rd 20 pts
4th 19 pts
5th 18 pts and so on down. 5 pts for taking part, but not finding.
 The years score is the total of 6 out of the 7 hunts (one lowest or 'no
show' score is dropped to cover teams holidays and performance blips!)
The 'Fox' is drawn from a hat of participating teams, and scores an average
of hunts they take part in.
The years score is the total of 6 out of the 7 hunts (one lowest or 'no
show' score is dropped to cover teams holidays and performance blips!)
The 'Fox' is drawn from a hat of participating teams, and scores an average
of hunts they take part in.
The Fox transmits a signal every 5 minutes for one minute only, starting at 7:30pm and finishing at 9:30pm when the location is given out, and the pub we will be meeting at! The location must be within a 20 KM radius of the starting point.
The Fox must not appear to be on private land, and must be within 150 Metres of a point accessible by a normal family salon car.
 As for the history, ARCON has been organising 'foxhunts' for over 30 years.
In the early days they were on the low frequency band of 160 Metres where
D.F receivers were made out of modified transistor radios, using the ferrite
rod as a directional antenna.
The 'fox' antenna was invariably a piece of wire many hundreds of feet long
strung up in trees and often over water, requiring the hunter to follow the
wire to the hidden transmitter!
As for the history, ARCON has been organising 'foxhunts' for over 30 years.
In the early days they were on the low frequency band of 160 Metres where
D.F receivers were made out of modified transistor radios, using the ferrite
rod as a directional antenna.
The 'fox' antenna was invariably a piece of wire many hundreds of feet long
strung up in trees and often over water, requiring the hunter to follow the
wire to the hidden transmitter!
2M (144MHz) became popular for ARCON foxhunts in the late 1970's when 2m F.M mobile transceivers became available, together with the possibility of constructing compact directional antennas.
Most teams built the ubiquitous 'HB9CV' type of antenna due to its sharp null and compact design, though sunroofs were still a luxury, so a planned stop had to be made, and the antenna hastily erected outside the car in time for the next fox transmission!
Through the 80's interest and competition grew. More teams constructed better attenuators and screened receivers as they found their rigs swamped by the strong signal from the fox at close range!
The foxes were also getting more devious, and hiding away from roads in woods and up foot-paths!
Some of the more memorable ones;
Up to this point, little separated the ability of teams, but those with close in hand-held 'sniffer' receivers able to cope with the big signal at close range, had the edge!
The early 90's saw the first team with home made doppler direction finding gear (a rule precludes commercial high-tech D.F apparatus) The championship table was starting to separate out with 2 teams in stiff competition at the top of the table. Jim Towle (G4PJZ) with his doppler gear, and Eddie Cairns (G0INA) using quality Standard gear, and a sharply honed knowledge of Nottingham from his taxi-driving days!
Up to this point, ARCON welcomed non-members to take part in the hunts, but they were not eligible to receive the trophy.
Whilst I was Chairman, I felt that this didn't endear any new prospective ARCON members, or create a balanced result to the championship (over half the teams were non members!) so I proposed the Foxhunt only membership mentioned above, to make teams like John and Dave eligible to receive the ARCON Foxhunt trophy and take part on a level playing field!
I have to say that I can't remember exactly when John Wood and Dave Bullock stepped into the ring, but their success has been legendary! I don't have access to all the previous years results, but they have certainly won the trophy the last 3 years running.
Only one team comes anywhere near beating them, and that's Adey (G7WFM) and Simon (G7WIQ), who use an advanced doppler system, and ARX/GPS Map tracking (but not GPSS!)
We get an average of 10 teams out for each hunt, but to my knowledge, Dave, Adey & Myself are the only 3 teams running GPS tracking
The range of ability and equipment is now wider than ever, so I would like to see things evened out a bit before some start to get discouraged!
Going 'public' with GPSS is one way to de-mystify some of the art!
- that's the end of my quote from Martin's message. I agree with his sentiments completely - although, of course, I have a vested business interest in spreading awareness about GPSS :-) The cartoon, further up on the right, is from a concept raised in an e-mail by Robin's friend Ted, on the west coast of USA, who shall remain anonomous to protect him from the 'animal rights brigade' :-)
Dave Bullock's son, in Nottingham UK, is setting up a DF website on www.ardf-uk.co.uk for those of you who are interested.
Please do not abuse the fact that you may e-mail these people.
If you would like to be added to the list, please e-mail Robin Lovelock with a brief
description of GPS and PC used to run GPSS, what it did when it first received GPS data,
and suitable information such as your office or home lat/lon.
UK
Martin Dale
and
Dave Bullock
ARCON Foxhunters in Nottingham. See above.
Israel: David Shmueli
has contact details on PARTNERS page "B" list.
USA
Mike Allison at 374047N1214450W Livermore. G45. MicroFinder DF. contact via
www.ahha-doppler.com
Holland
Peter de Blecourt 515697N0043417E Capelle. G12XL. DF.
Holland
Bert Oosterom 520794N0043917E Alphen. SanJ38.
DF Site
Italy
Luigi Costa 440250N0081270E Albenga. DFjr.
Bit telecomm snc Site
South Africa
Egbert Begemann 254872S0281496E Jo'burg. GPS20. DFjr ordered.
USA
Joe Agrelo 424918N0741083W Pattersonville nr Albany NY.
DFjr Site
USA
Joe Tomasone 404605N0731900W Long Island NY. Radio Ham & DFjr.
USA
Jon Pearch 282087N0811422W St Cloud, FL. EagleX. DFjr.
USA
Joe Minotti 283604N0812847W Pine Hills, FL. DFjr.
USA
Jim Korenz 405746N0812408W s of Cleveland. MotoPVT6. DFjr.
USA
Tom Snedden 324943N1165993W San Diego. G12XL. AhAh DF.
USA
George Carr 472812N1223644W w of Seattle. G2+. DFjr.
USA
Ron Cutler 401622N1114180W Orem nr Salt Lake. G12. WTS DF.
Dtek Site
Indonesia
Budi Rianto Halim 061371S1064662E Jakarta. Garmin. DFjr.
Web Site
If you are interested in doing any practical work with GPSS, you should start by downloading the GPSS Baseline from the DOWNLOAD page, get it working - preferably on a Laptop PC with GPS connected, then fill in the Quiz Form on the same download page, to get a key code from Robin, and be added to his contact list for support.
Robin may be able to put you in contact with others to help you build or buy the required hardware, including the interface that passes the DF data to GPSS. Alternatives include manually steerable yagi arrays, with shaft-angle-encoders, or the more sophisticated (but maybe less reliable) systems based upon fixed dipole arrays. Things to bear in mind are that you might get false bearings from reflections, or other transmitters, and so it may be wise to "keep the man in the loop" in your solution. e.g. a button which enables the bearings to be passed, based on an operator monitoring the signal. But "in an ideal solution" this should not be needed.
You should then check the OLDNEW Page, for any recent changes to DF logic - and consider upgrading to the later pre-release version of GPSS.EXE
The early automatic DF facilities were
tested and improved with the help of Joe Tomasone in Long Island USA, and then by Jim Korenz near Cleveland, USA. You can download and play back
some of their recorded GPSS-DFjr data, on street level mapping, by looking under
Cleveland and Long Island on the GPSS
USA Download Page.
You may also contact them
directly via the e-mail links below.
GPSS supports DF by a single, moving vehicle, where movement of the vehicle acts as the triangulation baseline. GPSS may receive bearings every 1 second, along with the GPS data, but only accepts and triangulates the next bearing when the car has moved further than a minimum baseline threshold distance. The default is 300m, but this can be configured by a file GPSSDF.CFG (see below) holding the distance expressed in kilometres. Updates to GPSS are in progress, and others anticipated, such as automatic baseline adjustment, or automatic suppression of triangulation during turns.
This permits fully automatic 'hands free' chasing of a transmitter, where the driver listens to the GPSS speech output triggered by the automatic DF process. Other options are possible, such as passing the DF and GPS data over a communications link, where the DF/GPS 'pod' is unmanned, and simply being carried by a moving platform in the vicinity of the target transmitter.
In the absence of GPSSDF.CFG, GPSS will assume default parameters.
If you wish to change these defaults, then a simple text file is needed, which
GPSS will find on startup :
A text file with name DFCOLOUR.CFG allows you to specify colour of each line
(GPSS only remembers up to 10 DF lines)
by putting each colour (and thickness) as a number. The following is an example DFCOLOUR.CFG:
Many GPS receivers will introduce a delay in the position and velocity being received
by GPSS. You can measure this delay, which may be several seconds, by timing how long
a turn by the car is reflected on the GPSS display. This delay can be a source of DF errors
since the DF bearing may be received by GPSS without such a delay.
GPSS v5.95e and later allows you to make GPSS introduce a delay to processing of the DF bearing,
so that it better matches the GPS position. Experiments will be needed to get the best
value for your DF and GPS equipment.
0.15
0
1
0
60
1.5
500
60
10
Only the above 9 lines are read from GPSSDF.CFG else, if this
file is not found, default values are used as follows
0.15 minimum travel by car along DF baseline before DFjr bearing accepted
if negative then all received bearings are displayed (GPSS v5.95 and later)
if a very large value then no automatic triangulation done.
0 flag = 0 for absolute bearing or = 1 for relative bearing (1 for DFjr)
1 flag = 0 to reject identical DFjr relative bearings or = 1 to accept all
0 minimum difference in absolute bearing, as degrees, for triangulation
60 minimum time between speaking locations triangulated
1.5 typical accuracy of bearing in degrees
500 likely maximum speed of target after allowing for bearing errors in kmph
60 maximum time since last fix for rejection based on velocity in seconds
10 maximum expected range of transmitter from car in kilometres.
DFCOLOUR.CFG controls DF line colour and thickness
16777215
255
65280
65535
0
-16777215
-255
-65280
-65535
-1
Optional DFCOLOUR.CFG for GPSS v5.95e and later.
If GPSS finds DFCOLOUR.CFG it will use data above
to define colour and thickness of DF bearing lines.
If DFCOLOUR.CFG is not included, defaults are used.
The above list of numbers are terminated by a blank line.
The first value is for the last DF bearing received by GPSS,
the next value is for the earlier bearing, etc, etc.
The value controls colour and line thickness.
Colour value = Red + Green * 256 + Blue * 65536
where Red, Green Blue are between 0 and 255 (maximum).
Yes, you will need a calculator for this :-)
Here are some examples for thick lines:
0 = black
255 = red
65280 = green
65535 = yellow
16776960 = cyan
16777215 = white
128 = dull red
64 = even darker red
Line thickness can also be specified.
Negative values indicate a thin line:
-255 = thin red
-16777215 = thin white
-65535 = thin yellow
-1 = thin black. think about it :-)
DFGPSDEL.CFG to correct for GPS delay
3.5
DFGPSDEL.CFG holds GPS delay in seconds to be applied to DF bearings